

Рис. 14.3
14.3. Влияние способа закрепления концов стержня на значение критической силы
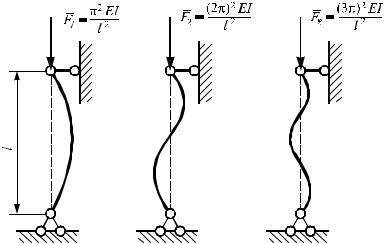
Формула Эйлера получена для стержня с шарнирами по концам. На практике встречаются и другие способы закрепления концов (рис. 14.4).
Формула критической силы для каждого из этих стержней может быть представлена в обобщенном виде:
Fкр=π2EI/(µl)2,
где µ – коэффициент приведенной длины, а величина µl=l0 называется приведенной, или свободной, длиной.
79
_ |
_ |
_ |
_ |
Fкр |
Fкр |
Fкр |
Fкр |
|
|
|
|
|
l=0,7l |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
l=2l |
l=l |
|
|
l=0,5l |
||||
|
|
|||||||
|
||||||||
|
||||||||
|
||||||||
|
||||||||
0 |
|
0 |
|
0 |
|
|
0 |
|
|
|
|
|
|
||||
|
|
|
|
|
||||
|
|
|
|
|
||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
µ=1 |
µ=0,7 |
µ=0,5 |
µ=2
Рис. 14.4
14.4. Практический расчет сжатых стержней
Определить значение критической силы для стального стержня двутаврового поперечного сечения, защемленного нижним концом (рис. 14.5).
Из таблиц ГОСТ моменты инерции и площадь поперечного сечения двутавра № 30 равны: Ix=7080 см4, Iy=337 см4,
А=46,5 см2. Модуль Юнга для стали Е=2,06×105МПа. Коэффициент приведенной длины µ=2.
При вычислении критической силы следует брать наименьший момент инерции поперечного сечения, так как потеря устойчивости стержня произойдет в плоскости наименьшей жесткости стержня.
80

_
F
5 м
y |
I №30 |
|
x
Рис. 14.5
В результате получим
Fкр=π2ЕIy/(µl)2=3,142 2,06 105 106 337 10–8/(2 5)2=68447 Н.
Нормальные напряжения в поперечном сечении, возникающие при действии этой сжимающей силы, равны
σкр=Fкр/A=68447/(46,5 102 – 4)=14,7Мпа.
Отсюда видно, что потеря устойчивости стержня наступает при напряжениях, значительно меньших предела текучести или предела прочности материала. В действительности сжимающая сила, прикладываемая к стержню, не должна превышать значение полученной критической силы.
81