

Рассмотрим свойства эвольвенты окружности.
1.Нормаль к эвольвентам (прямая КС) касается основной окружности, причем точка касания (С) является центром кривизны эвольвент.
2.Все эвольвенты одной основной окружности эквидистантны, и расстояниеKD между ними равно длине дуги К0D0.
3.Каждая ветвь эвольвенты вполне определяется радиусом основной окружности и положением начала отсчета эвольвентного угла.
При эвольвентном зацеплении изменение межосевого расстояния не влияет на значение передаточного отношения вследствие неизменности радиусов основных окружностей.
22.2.2.Геометрические элементы зубчатых колес
Геометрия зубчатого колеса зависит в первую очередь от размеров и формы инструмента. Поэтому стандартизация параметров инструмента, воспроизводящего эвольвентный профиль зубчатого колеса, необходима с технической и экономической точек зрения. За основу стандарта форм и размеров зубчатого ко-
леса приняттеоретический исходный контур(ТИК, рис. 22.5).
ИПК |
|
p |
|
|
|
|
c*m |
s0 |
e0 |
|
|
|
ha*m |
|
|
|
|
|
|
h a*m |
|
|
|
ρf*m |
|
c*m |
|
α |
α |
|
|
|
|||
делительная прямая |
|||||
ТИК |
(средняя линия) |
|
|
|
|
|
|
Рис. 22.5 |
|
|
|
|
|
160 |
|
|
|
Размеры теоретического исходного контура установлены государственным стандартом. Базовая линия теоретического исходного контура, по которой толщина зуба равна ширине впадины, называется его делительной прямой. Расстояние между одноименными профилями соседних зубьев по делительной или по любой другой параллельной ей прямой называют шагом зубьев р исходного контура.
Если форма инструмента повторяет форму ТИК, а делительная прямая является начальной прямой, то начальная окружность нарезаемого колеса касается делительной прямой ТИК. Как уже отмечалось ранее, подвижные центроиды катятся друг по другу без скольжения, поэтому шаг зубьев по н а- чальной окружности колеса должен быть равен шагу зубьев ТИК. Если z – число зубьев нарезаемого колеса, то длина окружности – подвижной центроиды колеса – определяется как
πd = zp , |
(22.10) |
||
где d – диаметр подвижной центроиды колеса равный |
|
||
d = |
p |
z = mz . |
(22.11) |
|
|||
|
π |
|
|
Подвижную центроиду колеса при его зацеплении с рейкой называют делительной окружностью. Делительная ок-
ружность делит зуб на делительную головку и делительную ножку. В выражении (22.11) введен основной параметр зубчатого зацепления – модуль m:
m = |
p |
. |
(22.12) |
|
|||
|
π |
|
|
Модуль измеряется в миллиметрах и может принимать только значения, оговоренные государственным стандартом. В долях модуля задаются все линейные размеры контура:
высота делительной головки
h = h*m , |
(22.13) |
a a |
|
161
высота делительной ножки
h |
f |
=( h* + c* )m , |
(22.14) |
|
|
|
a |
|
|
радиус переходной кривой |
|
|
||
|
|
ρf |
= ρ*f m , |
(22.15) |
где ha* – коэффициент высоты головки; с* – коэффициент радиального зазора; ρ*f – коэффициент радиуса переходной кривой.
Угол α между главным профилем зуба (прямая линия бокового профиля зуба является вырожденной эвольвентой ок-
ружности при rb → ∞) и осью симметрии зуба называется углом профиля исходного контура. Государственный стандарт устанавливает следующие значения параметров исходного контура:
h* =1,0; c* = 0,25; |
ρ* |
= 0,384; α = 20°. |
a |
f |
|
Исходным производящим контуром называется такой, ко-
торый заполняет впадины теоретического исходного контура, как отливка заполняет форму (рис. 22.5, ИПК). При этом между прямой вершин теоретического исходного контура и прямой впадин исходного производящего контура сохраняется радиальный зазор с*m. Это делается для того, чтобы поверхность впадин инструмента, образованного на базе исходного производящего контура, не участвовала в процессе нарезания зубьев.
22.2.3.Кинематика зубчатых механизмов
снеподвижными осями
Передаточное отношение одной пары цилиндрических колес
U |
12 |
= |
ω1 |
= ± |
r2 |
= ± |
z2 |
, |
||
r |
z |
|||||||||
|
|
ω |
2 |
|
|
|
||||
|
|
|
|
1 |
1 |
|
||||
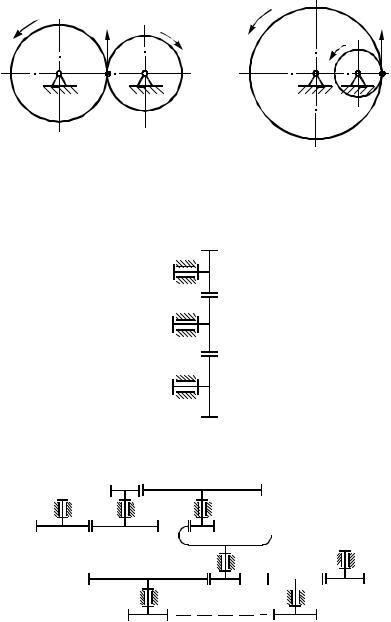
где для внешнего зацепления берется отрицательный знак – колеса вращаются в разные стороны (рис. 22.6).
162
ω1 |
_ |
ω1 |
|
|
_ |
VA |
ω |
|
ω2 |
VA |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
O1 |
A |
O2 |
O1 |
O2 |
A |
Рис. 22.6
Зубчатые механизмы с неподвижными осями по типу исполнения разделяют на передачи с последовательным соединением зубчатых колес (рядовые) и ступенчатые.
Рядовая передача
|
z1 |
|
|
z2 |
|
|
z3 |
|
|
Рис. 22.7 |
|
Ступенчатая передача |
|
|
|
3 |
4 |
1 |
5 |
|
2 |
|
|
|
8 |
|
|
7 |
|
|
9 |
|

 6
6
n-1 
 n
n
n-2
Рис. 22.8
163