

z ro 





r
Рис. 7.8
8. ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
Аналитическая механика устанавливает общие, единые методы изучения движения и равновесия, применяемые для всех материальных систем. Эти методы представляют собой исследования всех возможных движений материальной системы средствами математического анализа. Связями называют такие условия, которым должны удовлетворять в процессе движения системы координаты точек, скорости и их ускорения при действии на точки любых активных сил. Связи могут выражаться ка- кими-то соотношениями между координатами точек, их скоростями, компонентами и даже производными высших порядков. Соотношения, выражающие наложенные связи, могут представлять собой уравнения или неравенства.
В аналитической механике также применяют аксиому о связях, рассмотренную в статике, т.е. считают, что влияние связей на положение и движение материальных точек осуществляется посредством действия сил реакций связей.
Связи можно подразделить на два класса: голономные и неголономные связи.
Голономными называют связи, выражающиеся конечными уравнениями или неравенствами относительно координат, или же интегрируемыми дифференциальными уравнениями относительно координат. Голономные связи часто называют геометрическими связями.
45
Неголономными называют связи, выражающиеся неинтегрируемыми дифференциальными уравнениями относительно координат, т.е. уравнениями, содержащими не только координаты точек системы, но и их производные по времени. Неголономные связи также называют кинематическими, так как они налагают условия не только на координаты точек системы, но и на их скорости и ускорения.
Связи, не зависящие от времени, называют стационарными.
8.1. Обобщенные координаты
При решении задач механики независимые декартовы координаты обычно выражают через некоторые другие геометрические параметры. В кинематике, например, применяются криволинейные координаты. В аналитической механике подобные параметры называют обобщенными координатами. Обобщенными координатами могут являться какие-то углы, отрезки или другие величины.
Числом степеней свободы системы с голономными связями называют число независимых обобщенных координат, через которые можно выразить декартовы координаты всех точек системы.
Для определения траектории и закона движения по ней каждой точки системы достаточно сначала найти в функциях времени все обобщенные координаты qi, а затем по зависимостям, выражающим декартовы координаты точек системы через обобщенные координаты, можно выразить все декартовы координаты в функциях времени, т.е. установить движение системы. Для определения обобщенных координат системы необходимо иметь дифференциальные уравнения движения относительно qi. Правила составления таких уравнений выводятся в аналитической динамике.
46
8.2. Возможные перемещения
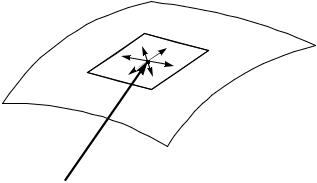
Рассмотрим понятие возможного перемещения для точки в случае голономных связей (рисунок).
Условие связи выражается в том, что точка В находится на некоторой поверхности. Положение точки при данной связи рассмотрим в некоторый момент времени, при этом можно мысленно представить, какие элементарные перемещения допускаются данной связью.
Возможным перемещением точки называют мыслимое бесконечно малое перемещение, допускаемое связями, нало-
женными на точку в данный момент времени (δr).
_
B
δr
_
r
0
Действительным перемещением за время dt называют элементарное перемещение точки, которое она фактически совершает в пространстве за время dt при заданных связях. При этом если связь, наложенная на точку, не зависит от времени, то каждое из действительных перемещений точки совпадает с одним из возможных перемещений. Если на точку действует сила F, то учитывая возможные перемещения точки из данного ее положения, допускаемые связями, можно вычислить величину элементарной работы силы на том или ином возможном перемещении. Эта работа и является элементарной работой силы.
47