

Для определения полных усилий S1 и S2 надо учесть центробежное воздействие C, вызывающее в ветвях ремня дополнительно растягивающую силу:
C = ρFV 2 , |
(24.4) |
где ρ – плотность материала ремня; V – скорость ремня, м/с;
F – площадь поперечного сечения ремня.
Таким образом, натяжение в ветвях при работе передачи будет равно S1 + C; S2 + C и при холостом ходе S0 + C.
25.ЦЕПНЫЕ ПЕРЕДАЧИ
25.1.Общие вопросы
Работа цепных передач так же, как и зубчатых, основана на принципе зацепления, но подобно ременной с использованием промежуточной гибкой связи (цепи). Цепь охватывает звездочки и передает вращение от ведущего вала к ведомому. Это позволяет осуществлять передачу энергии с постоянным значением среднего передаточного числа без проскальзывания при значительных межосевых расстояниях (6…8 м).
Цепные передачи можно использовать для одновременного привода нескольких параллельных валов со звездочками.
Наиболее широкое применение цепные передачи нашли в легких транспортных машинах (велосипеды, мотоциклы), в машинах непрерывного транспорта (конвейеры), в техническом машиностроении, в горном оборудовании и подъемнотранспортных устройствах. Втулочно-роликовые цепи (рис. 25.1, а) применяются при скоростях цепи не выше 15-18 м/с. Для более высоких скоростей (до 30 м/с) следует применять бесшумные зубчатые цепи (рис. 25.1, б).
188
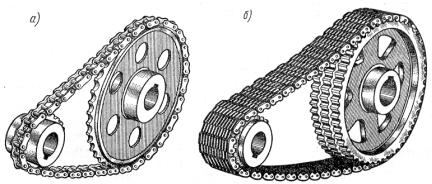
Рис. 25.1. Цепная передача:
а) роликовой цепью; б) зубчатой цепью
Передачи выполняют горизонтальными, наклонными (до 45°) и реже – вертикальными (требуется систематическое регулирование межосевого расстояния). Чаще всего цепные передачи используются при скоростях цепи V ≤ 10 м/с в приводах малой и средней мощности (до 100 кВт).
Наибольшее провисание ведомой ветви составляет f = 0,02 аW (наклон до 45°) и f = (0,015 …0,01) аW при наклоне > 45°. Для натяжения и регулирования провисания применяют подвижные опоры звездочек или гладкие натяжные ролики.
Для повышения износостойкости и долговечности цепной передачи и уменьшения потерь на трение необходима хорошая смазка – и в первую очередь шарниров цепи.
25.2. Классификация цепных передач
По характеру работы – грузовые, тяговые, приводные. По типу цепей – роликовые, втулочные, зубчатые.
По количеству цепей, передающих нагрузку – однородные и многорядные.
По характеру изменения частоты вращения ведомого вала – понижающие и повышающие.
По количеству ведомых звездочек – нормальные (одна ведо-
мая звездочка) и специальные (несколько ведомых звездочек).
189
25.3. Достоинства и недостатки цепных передач
Достоинства цепных передач:
1)возможность применения при значительном (до 5 м) межосевом расстоянии;
2)меньшие, чем у ременных передач, габариты;
3)отсутствие скольжения и высокий КПД;
4)малые силы, действующие на валы, так как нет необходимости в большом предварительном натяжении цепи;
5)возможность простой и легкой замены цепи;
6)возможность передачи движения нескольким звездочкам. Недостатки цепных передач:
1)значительный шум из-за удара звена цепи при входе в зацепление, особенно при малом числе зубьев звездочек и большом шаге;
2)они требуют более высокой точности установки валов, чем клиноременные передачи, и более сложного ухода и регулирования;
3)передачи требуют установки в картерах;
4)сравнительно быстрое изнашивание шарниров цепи вследствие затруднительного подвода смазочного материала;
5)удлинение цепи из-за износа шарниров, что требует применения натяжных устройств;
6)скорость движения цепи, особенно при малых числах зубьев звездочек, не постоянна.
25.4. Детали цепных передач
Цепь является основным элементом, определяющим ее надежность и долговечность. Цепь состоит из шарнирно соединенных звеньев. Параметры цепей регламентированы стандартами. Характеристикой прочности цепи служит разрушающее усилие, величина которого устанавливается опытным путем на заводе-изготовителе.
Основными геометрическими характеристиками цепи является шаг «t» и ширина «b». По этим размерам и подбирают цепи.
190
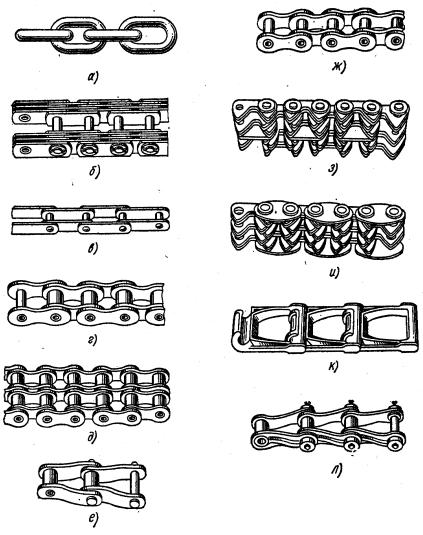
Грузовые цепи (рис. 25.2, а, б) работают при малых скоростях (до 0,25 м/с) и больших нагрузках, их выполняют круглозвенными или простыми пластинчатыми и применяют для подвески, подъема и опускания груза в грузоподъемных устройствах.
Рис. 25.2. Основные типы цепей
191
Тяговые цепи (рис. 25.2, в) – работают при средних скоростях (до 2…4 м/с). Состоят из пластин простой формы и осей со втулками или без них. Эти цепи имеют большие шаги, т. к. Общая длина цепи значительна и их зубья взаимодействуют со звездочками, габариты которых нежестко ограничены. Применяются для перемещения грузов в транспортирующих устройствах.
Приводные цепи (рис. 25.2, г–л) – работают при значительных скоростях. Они выполняются с малым шагом для уменьшения динамических нагрузок и с износоустойчивыми шарнирами для обеспечения необходимой долговечности цепи.
В настоящем разделе курса рассматриваются только при-
водные цепи.
Различают приводные роликовые (рис. 25.3) и втулочные цепи (ГОСТ 13568-75).
Приводная роликовая (ПР) цепь состоит из последовательно чередующихся внутренних (1) и внешних (2) пластин (3 звеньев), шарнирно соединенных между собой. Каждый шарнир состоит из валика (3) диаметром d, впрессованного во внешние пластины, и втулки (4), впрессованной в отверстие внутренних пластин (рис. 25.3). Ролик (5) свободно вращается на втулке и предназначен для уменьшения износа звеньев звездочки. Концы цепи соединяются с помощью разборного дополнительного звена.
Приводная втулочная (ПВ) цепь отличается от роликовой тем, что не имеет роликов (5). Весцепи меньше, но износ зубьев звездочки больше за счет скольжения между втулками и зубьями.
Длина цепи кратна числу соединительных пластин. При их чётном числе для соединения цепи в кольцо применяются нормальные соединительные звенья (рис. 25.4, а), а при нечё т- ном специальные переходные звенья (рис. 25.4, б).
Для уменьшения размеров передачи при реализации больших усилий обычно применяют многорядные цепи с малым шагом. Их собирают из тех же элементов, за исключением валиков, длина которых равна общей ширине цепи. Чаще всего применяют 2-х (2ПР) и 3-х (3ПР) – рядные цепи.
192
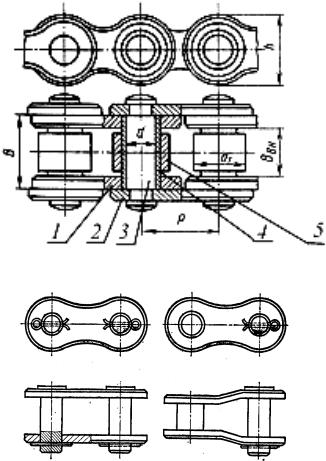
Рис. 25.3. Конструкция роликовой цепи
аб
Рис. 25.4. Соединительные звенья роликовой цепи: нормальные (а), переходные (специальные) (б)
Если передача работает в условиях ударной нагрузки, то применяют цепи с изогнутыми пластинами (ПРИ), благодаря чему в цепи возникают деформации изгиба и повышается податливость цепи (рис. 25.2, е). Деформирование пластин способствует гашению ударов.
Для пластин используется сталь 50 и 40Х, для втулок и валиков – сталь 20, 20Г, 20Х и др. при твердости HRC 47…55.
193