

23. ЗУБЧАТЫЕ РЕДУКТОРЫ. ОБЩИЕ СВЕДЕНИЯ
23.1. Классификация редукторов
Редуктором называется передача, смонтированная в отдельной закрытой коробке, называемой корпусом, и предназначенная для снижения угловой скорости и соответственно повышения вращающего момента на ведомом валу.
Установка передачи в отдельном корпусе гарантирует точность сборки, лучшую смазку, более высокий КПД, меньший износ, а также защиту от попадания в нее пыли и грязи. Во всех ответственных установках вместо передач назначают редукторы. Редукторы имеют исключительно широкое применение. Тип
иконструкция редуктора определяются видом, расположением
иколичеством отдельных его передач (ступеней) (рис. 23.1).
Самый простой зубчатый редуктор – одноступенчатый (цилиндрический (рис. 23.1 а)). Используется при малых передаточных числах i ≤ 8 … 10, обычно i ≤ 6,3.
Двухступенчатый цилиндрический зубчатый редуктор (рис. 23.1 б) является наиболее распространенным (их потребность оценивается в 65 %). Для них наиболее характерны числа i = 8-40.
Трехступенчатые редукторы (рис. 23.1 в) применяются при больших передаточных числах. Однако имеется тенденция замены их более компактными планетарными редукторами.
Конические зубчатые редукторы применяются в том случае, когда быстроходный и тихоходный валы должны быть взаимно перпендикулярны. Обычно передаточное число таких редукторов невелико i ≤ 6,3. При i >12,5 применяют коническо-
цилиндрические редукторы (рис. 23.1 ж).
Для улучшения работы наиболее нагруженной тихоходной ступени (T) используются редукторы с раздвоенной быстроходной ступенью (рис. 23.1 г). Для создания равномерной нагрузки обеих зубчатых пар быстроходной ступени их делают косозубыми, причем одну пару правой, а вторую – левой. Зубчатые колеса на тихоходном валу располагаются симметрично.
174
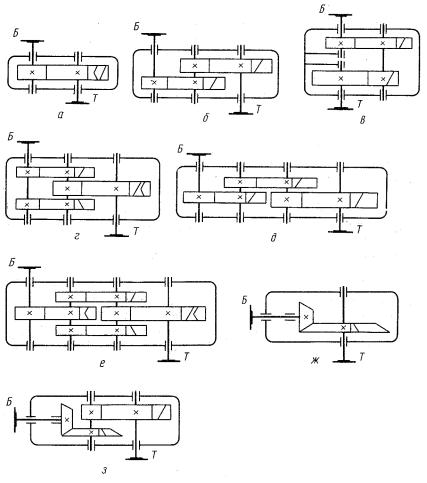
При этом деформация вала (Т) не вызывает существенной концентрации нагрузки по длине зубьев. Это положительное явление. Такие редукторы получаются на 20 % легче, чем по обычной развернутой схеме (рис. 23.1 в).
Соосные редукторы (рис. 23.1 д) применяют с целью уменьшения длины корпуса или других конструктивных особенностей привода.
Рис. 23.1. Зубчатые редукторы
175
Мотор-редукторы представляют собой компактные агрегаты, в которых редуктор и мотор монтируются в одном корпусе. В большинстве случаев мотор-редукторы имеют зубчатые передачи. Они более экономичны, чем тихоходные электродвигатели, имеют более высокий КПД. Но из-за сложности конструкции мотор-редукторы применяются редко.
23.2. Принципиальная конструкция цилиндрического редуктора
На Рис. 23.2 приведена конструкция одноступенчатого косозубого цилиндрического редуктора. Редуктор состоит из литого чугунного корпуса 3, в котором смонтированы подшипниковые узлы, служащие опорами для быстроходного и тихоходного валов редуктора. Подшипниковые узлы состоят из подшипника 2, крышки подшипника 1, регулировочных прокладок 19 и маслоудерживающего кольца 18. Для выходного конца вала применяют проходные крышки с уплотнениями 14. Размещение опор валов в жестком чугунном корпусе обеспечивает высокую точность зацепления и долговечность привода.
Корпус закрыт крышкой 9. В верхней части крышки 9 имеется закрываемое смотровой крышкой 11 отверстие, предназначенное для осмотра внутренней части редуктора и заливки масла. Для обеспечения плотности стыка между смотровой крышкой 11 и отверстием установлена прокладка 10.
При сборке редуктора крышка 9 крепится к корпусу 3 двенадцатью болтами 6 с гайками 8 и пружинными шайбами 7. Центрирование отверстий под болты 6 в корпусе и крышке редуктора происходит с помощью двух штифтов 13.
Редуктор в сборе перемещают грузоподъемными средствами с помощью двух рым-болтов 12. Для слива отработанного масла служит пробка 17. Контроль уровня масла в редукторе производят жезловым маслоуказателем 16.
Быстроходный вал обычно выполняют в виде валашестерни 15, а зубчатое колесо 4 насаживают на тихоходный вал 4 с помощью шпоночного соединения.
176
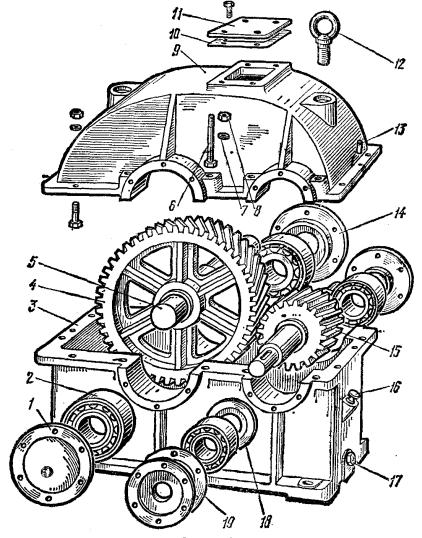
Рис. 23.2. Редуктор цилиндрический косозубый
177