

9.3. Общие положения теории удара
Силы, действующие на тела, подразделяют на конечные силы, т.е. силы, изменяющие скорости точек в течение некоторого конечного промежутка времени, и силы мгновенные, или ударные, изменяющие скорости точек в течение весьма малого промежутка времени (0.1–0.01 с).
Силу, действующую в течение весьма малого промежутка времени, но достигающую при этом таких больших значений, что ее импульс за это время становится конечной величиной, называют мгновенной (ударной) силой.
Пусть F – ударная сила, τ – время действия этой силы, то-
τ
гда импульс за промежуток времени τ: S = ∫Fdt . Здесь S – ко-
0
нечная величина. Это возможно в случае, если величина силы
порядка 1/τ, где τ – малая величина. Импульс S называют ударным. Явление, при котором возникают мгновенные, или ударные, силы называютударом.
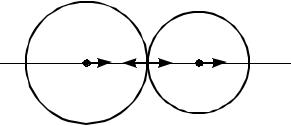
Рассмотрим на примере соударения двух тел А и В (рис. 9.3) процесс удара. Считаем, что контакт происходит в одной точке.
A |
|
B |
|
_ |
_, |
_ |
|
V |
V |
x |
|
1 |
F |
2 |
|
|
_ |
|
|
|
F |
|
|
Рис. 9.3
Тело А в момент соприкосновения имеет скорость V1, а тело В – скорость V2 (допустим, что V1> V2). Общую нормаль к поверхности соударяющихся тел в точке их контакта назовем линией удара.
53
Если центры масс соударяющихся тел лежат на линии удара, то удар называют центральным. Центральный удар называют прямым, если скорости центров масс соударяющихся тел в начале удара направлены по линии удара. Тела считаются абсолютно гладкими. После момента соприкосновения оба тела деформируются, при этом скорость тела А уменьшается, а скорость тела В увеличивается. Процесс деформации заканчивается тогда, когда скорости тел станут равными [27]. Эту
часть явления удара называют фазой деформации τ1. Ударный
τ1
импульс силы F за фазу деформации S1 = ∫Fdt .
0
Импульс силы F (F = −F ) за эту же фазу обозначим
S1 : S1 = −S1 . Если тела упруги, то после деформации они вос-
станавливают свою форму целиком и полностью. Эту часть явления удара называют фазой восстановления (продолжи-
тельность этой фазы τ2). Импульс ударной силы, действующей на тело А, за эту фазу восстановления
τ
S2 = ∫Fdt ,
τ1
где τ=τ1+τ2 (время продолжительности удара).
Эффект действия ударной силы оценивается по ее импульсу – конечной величине. Теоремы, применяемые к удару, формулируют так, чтобы в них входили не ударные силы, а ударные импульсы.
По коэффициенту восстановления k=S2/S1 оценивают упругость соударяющихся тел.
При k=0 величина S2=0, т.е. фаза восстановления отсутствует – абсолютно неупругий удар.
В случае k=1 величина S2=S1, можно считать, что тела полностью восстанавливают свою форму (абсолютно упругий удар) – это фаза восстановления.
Удар называют упругим при 0<k<1, при этом происходит удар тел средней упругости.
54