

Лекция 8. Рычаг. Устойчивость против опрокидывания.
Рис. 7.3. Рычаг |

Предположим,
что на рычаг в частном случае действуют
заданные силы
![]() ,
,
![]() ,…,
,…,
![]() ,
лежащие в плоскости чертежа, а также
реакции
,
лежащие в плоскости чертежа, а также
реакции
![]() и
и
![]() шарнирно-неподвижной опоры А
(рис.
7.3). Составим уравнения равновесия
сил, приложенных к рычагу:
шарнирно-неподвижной опоры А
(рис.
7.3). Составим уравнения равновесия
сил, приложенных к рычагу:
|
(7.1) |
(7.2) |
|
(7.3) |

Здесь:
![]() ,
,
![]() и
и
![]() – проекции на оси координат задаваемых
сил и сумма их моментов относительно
точки А,
соответственно.
– проекции на оси координат задаваемых
сил и сумма их моментов относительно
точки А,
соответственно.
Из уравнений (7.1) и (7.2) можно найти реакции и опоры рычага, а в уравнение (7.3) неизвестные реакции не входят. Это уравнение накладывает условие на задаваемые силы, приложенные к рычагу, и представляет собой условие, при котором рычаг находится в равновесии:
=0.
Для того, чтобы рычаг находился в равновесии, необходимо вы-
Рис. 7.4. Схема сил, действующих на параллелепипед |
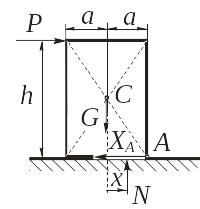
Рассмотрим
твердое тело в виде однородного
прямоугольного параллелепипеда, которое
покоится на горизонтальной поверхности
(рис. 7.4). На тело наложена нелокальная
односторонняя связь. Пусть известны
сила тяжести тела
![]() и его размеры a
и h.
и его размеры a
и h.
Предположим,
что на тело действует горизонтальная
опрокидывающая сила
![]() ,
которая увеличивается от нуля. В точке
А
имеется препятствие, предотвращающее
скольжение тела по плоскости.
,
которая увеличивается от нуля. В точке
А
имеется препятствие, предотвращающее
скольжение тела по плоскости.
При
P=0
горизонтальная реакция XA=0,
а линия действия локализованной
нормальной реакции опоры N=G
проходит через точку С.
Когда сила
становится больше нуля, то для того,
чтобы тело находилось в равновесии,
нормальная реакция
![]() должна сдвинуться в сторону точки А
на некоторое расстояние x,
которое можно найти из уравнения,
представляющего собой сумму моментов
всех сил относительно оси x,
перпендикулярной плоскости чертежа и
проходящей через точку А:
должна сдвинуться в сторону точки А
на некоторое расстояние x,
которое можно найти из уравнения,
представляющего собой сумму моментов
всех сил относительно оси x,
перпендикулярной плоскости чертежа и
проходящей через точку А:
mg∙x - P∙h=0.
Если обозначить: Mуд=mg∙x - момент удерживающих и Mопр=P∙h - момент опрокидывающих сил, то это уравнение приобретает вид:
Mуд= Mопр.
При дальнейшем увеличении силы расстояние x увеличивается и, наконец, в момент времени, когда x станет равен а, начнется опрокидывание тела (частичный сход тела со связи). При этом линия действия реакции достигает одной из точек оси x, лежащей на границе множества опорных точек тела.
Для оценки устойчивости тела против опрокидывания вводят понятие коэффициент устойчивости против опрокидывания, вычисляемый как отношение момента Mуд удерживающих к моменту Mопр опрокидывающих сил:
 .
.
Рис. 7.5. Схема к определению условий опрокидывания тела в случае нелокальной односторонней связи |
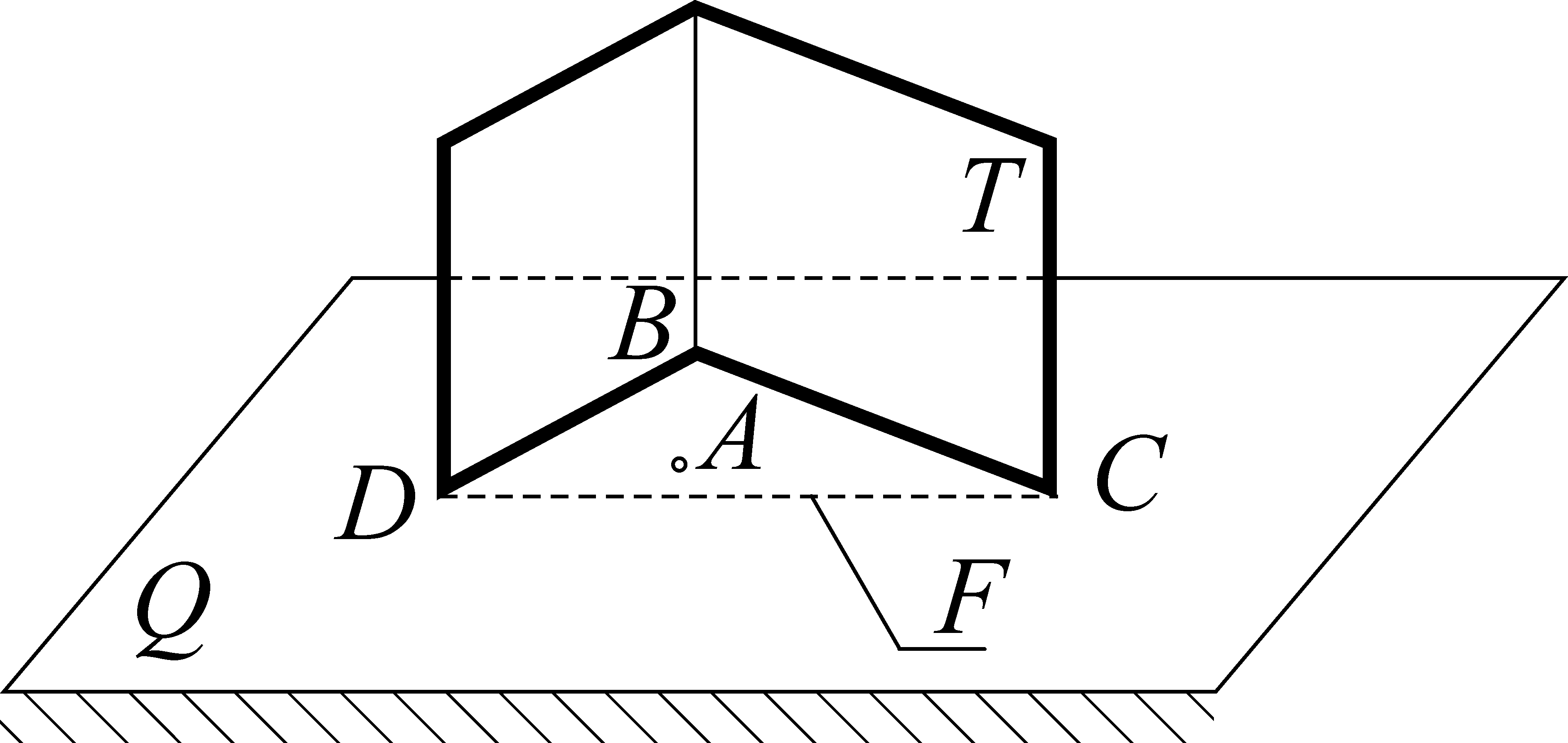
При наличии нелокальной односторонней связи может наблюдаться частичный сход тела со связи, который может произойти, если точка А приложения равнодействующей сил реакций смещается на границу выпуклого контура F, натянутого на множество опорных точек тела. Таким образом, условие частичного схода с нелокальной односторонней связи имеет вид: AÎF.
В простейшем случае частичный сход со связи представляет собой опрокидывание. На рис. 7.5 показано тело Т, множество опорных точек которого представляют собой ребра DB и BC. Выпуклым контуром F в этом случае является треугольник DBC. Опрокидывание тела Т наступает при условии, что точка А приложения равнодействующей сил реакций оказывается на границе контура F. В случае, если точка А находится на контуре F и не совпадает ни с одной вершиной треугольника DBC, то опрокидывание тела может произойти путем вращения вокруг ребра, на котором лежит эта точка. Если точка А совпадает с одной из вершин треугольника, то опрокидывание произойдет вращением вокруг этой вершины.
В более общем случае, когда контур F представляет собой произвольную плоскую кривую с непрерывной первой производной, опрокидывание тела происходит путем вращения вокруг касательной, проведенной к этой кривой в точке А, лежащей на этом контуре.