

II класса 5 вида
Исходные данные: υD3, υD6 = 0; ω3 = ω6 = 0;аD3 =аD6 = 0.
Определить: υD5,аD5.
Решение.Построение плана скоростей. Также как и вЗадаче 4, в точкеDсоединяются четыре звена. Поэтому будут четыре точки:D3, D4, D5, D6(рисунок 2.11). После расчета масштабного коэффициента скорости по формуле (2.30) записываются векторные уравнения-формулы (2.54). Построение плана скоростей ведется аналогичноЗадаче 4. Угловые скорости звеньев4и5равны нулю, т.к. они движутся поступательно (ω4 = ω5 = 0). Рассчитывается скорость точкиD5по формуле (2.54). Строится план ускорений. Высчитывается масштабный коэффициент плана ускорений по формуле (2.56). Затем записываются векторные уравнения – формулы (2.57). В данном случае кориолисово ускорениеакD3D4 = 0, т.к.ω4 = 0.
Построение плана ускорений ведется аналогично Задаче4. В конце рассчитывается ускорение точкиD5по формуле (2.59).
а) б) в)
х
 у
у 
 6
5 уυD5
аD5
6
5 уυD5
аD5

 Pυ
d5
d5
Pa
Pυ
d5
d5
Pa















D(D3,D4,D5,D6) 4 υD3 υD5D3 аD5D3 аD3
 3
υD3
d3
d3
3
υD3
d3
d3
aD3
х
а – структурная группа; б - план скоростей; в - план ускорений
Рисунок 2.11 - К кинематическому расчету структурной группы II класса 5 вида
Итак, мы рассмотрели определение скоростей и ускорений методом планов для всех видов структурных групп. Пример кинематического расчета шестизвенного механизма будет приведен в главе 3, п. 3.1.8. А теперь подведем некоторые итоги по правилам построения планов.
Свойства планов скоростей, ускорений
Векторы всех полных (абсолютных) скоростей (ускорений) имеют своим началом точку полюса, а векторы относительных скоростей (ускорений) соединяют собой концы векторов полных скоростей (ускорений).
Векторы полных скоростей (ускорений) всегда направлены от полюса. Векторы относительных скоростей (ускорений) направлены так, чтобы удовлетворялись векторным уравнениям (т.е. к той точке, которую строим).
Скорости (ускорения) точек подобных фигур (жестких треугольников или отрезков) находятся по правилу подобия (см. Задачи 1 и 2).
Точки, скорости и ускорения которых равны нулю, находятся в полюсе.
При плоскопараллельном движении векторы относительных ускорений образуют со звеном угол μ, тангенс которого равен tgμ=ξ /ω2.
2.4.3 Определение перемещений, скоростей и ускорений методом построения кинематических диаграмм
При кинематическом исследовании механизма необходимо определять скорости и ускорения за полный цикл движения механизма. Для этого исследование проводится для ряда положений механизма, достаточно близко отстоящих друг от друга. По полученным значениям строятся графики, носящие названия кинематических диаграмм.
Кинематические диаграммы - графики зависимости перемещенияS, скорости Vи ускоренияa от времениtили от угла поворота φ, а именно
S = f(t); υ =f(t); a= f(t).
В зависимости от характера движения исследуемых звеньев или отдельных точек механизма могут быть построены и различные кинематические диаграммы. Например, если известен ход поршня (ползуна), то можно построить диаграмму перемещения, а по ней методом графического дифференцирования строятся графики скорости и ускорения. Если же задается диаграмма ускорения ведомого звена, то методом графического интегрирования строятся графики скорости и перемещения.
Задача 1. Метод графического дифференцирования
Графическое дифференцирование можно проводить методом касательных или методом хорд. Метод касательных имеет более низкую точность по сравнению с методом хорд.
Метод хордпредполагает замену заданной кривой ломаной линией, т.е. полученные точки соединяют хордами. При этом принимают следующее допущение: угол наклона касательных в точках, расположенных посередине каждого участка кривой, равен углу наклона соответствующей хорды. Это допущение вносит некоторую погрешность, но она относится только к данной точке. Эти погрешности не суммируются, что обеспечивает большую точность метода по сравнении с методом касательных.
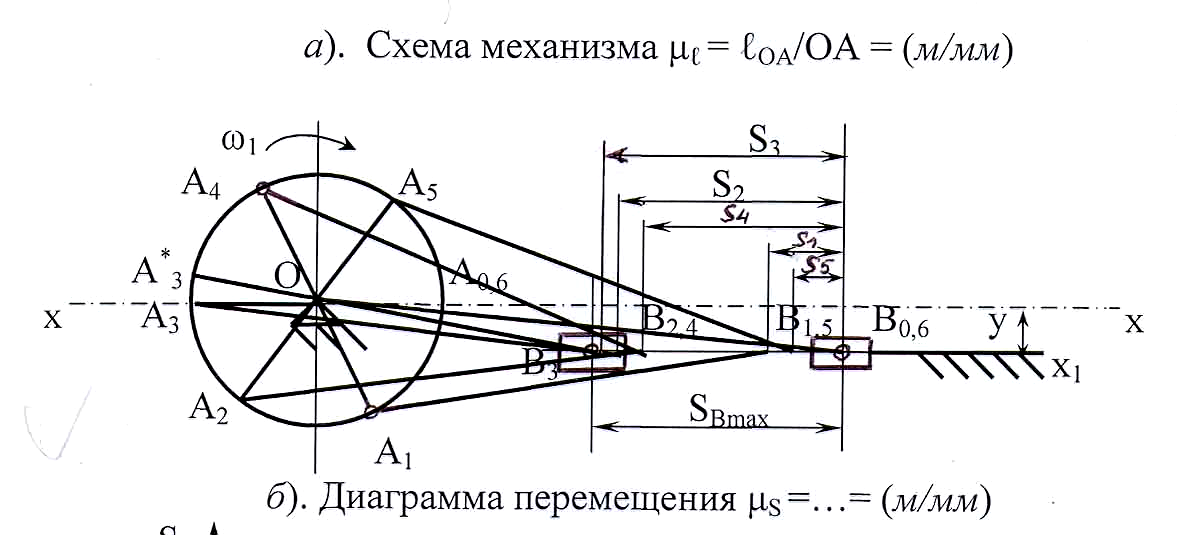
Рассмотрим на примере кривошипно-ползунного механизма (рисунок 2.1). Изобразим кривошипно-ползунный механизм в 6-и положениях, начиная с крайних (см. гл. 2. §2.2). Затем делим траекторию движения точки А(окружность радиусом ОА) от точкиА0на 6 частей в сторону вращения (рисунок 2.12). Получаем точкиА1, А2, А3и т.д. Из полученных точек радиусомАВделаем засечки на траектории движения точкиВ. Получаем точкиВ1, В2, В3и т.д. Второе крайнее положение не совпало с разбивкой, поэтому его нужно достроить. Переходим к построению диаграммы перемещения.
Построение диаграммы перемещения. Строим оси координатS-t. Ось абсцисс (времениt) делим на 6 равных частей. Диаграмму перемещения можно строить в масштабе μS = μℓ. Для этого замеряем расстояния от точкиВ0до точекВ1, В2и т.д. Получаем расстоянияS1 = h1,S2 = h2и т.д., которые откладываем по вертикали.
Расстояние Smaxдолжно равнятьсяhmax. Если же получается слишком низкий или очень высокий график, то масштабный коэффициент считают заново:
μS = Smax μℓ / hmax, (2.60)
где hmaxвыбирают нужной величины. Затем считают высотыh1 = S1 μℓ /μS =(мм),h2и т.д.
Mаксимум на графике перемещения должен соответствовать второму крайнему положению. Поэтому, находим на осиtточку 3*. Для этого определим отрезок3-3*из пропорции:
![]()
и от полученной точки (3*) откладываем вверх высоту hmax.
Приступаем к построению диаграмм скоростей и ускорений методом графического дифференцирования.
Для построения диаграммы скоростипродолжаем осьОSвниз. Горизонтально проводим осьt и делим ее на те же равные 6 частей. Влево от точкиОпроизвольно откладываем полюсное расстояние Н1=ОР1(чем большеполюс, тем выше будет диаграмма скоростей). Параллельно хордам 0-1, 1-2, 2-3 и т.д. из полюсаР1проводим лучи и на серединах каждого участка отмечаем точки 1, 2, 3и т.д. Соединяем все точки плавной линией. Заметим:максимальному значению ординатыдиаграммы перемещения соответствует нулевое значение ординаты диаграммы скорости.
Имея диаграмму скоростей аналогично можно построить диаграмму ускорений, дифференцируя первую. Нужно отметить, что первая и последняя точки получатся на ¼ первого и последнего участков, остальные же точки должны получится на делительных отрезках.
Схема механизма μℓ = ℓОА/ОА = (м/мм)
 SДиаграмма
перемещения μS
=…= (м/мм)
SДиаграмма
перемещения μS
=…= (м/мм)









 3 max
3 max


2 h3 4



 hmax
hmax
h2



 1
h4 5
1
h4 5
 h1h5
h1h5
0 1 2 3 3* 4 5 6 t
Диаграмма скорости μV=…= (м/с/мм)







 V
V



 2΄
2΄

























 3΄
3΄
1΄ h'1 h'2






 Р1
Р1

 0
1 2 3 *4
h'4
h'5
5 6t
0
1 2 3 *4
h'4
h'5
5 6t

 4΄6΄
4΄6΄
 Н1
5΄
Н1
5΄
Д иаграмма
ускоренияμа=…=
(м/с2/мм)
иаграмма
ускоренияμа=…=
(м/с2/мм)













 а
а


 h''0
h''1
h''5
h''6
h''0
h''1
h''5
h''6









 Р2
0
1/4
1 2 3 4 5 1/4
6 t
Р2
0
1/4
1 2 3 4 5 1/4
6 t






 h''2
μt=…=
(с/мм)
h''2
μt=…=
(с/мм)
h''3


 Н2
Н2
Рисунок 2.12 - Построение диаграмм методом графического
дифференцирования с помощью хорд
Также нужно учесть, что возрастающим координатамдиаграммы скорости соответствуют положительные значения ординат диаграммы ускорения, а убывающим ординатам – отрицательные. Хорды ускорений вписываются по средним значениям скоростей.
После построения диаграмм высчитываются масштабные коэффициенты:
t дейст
= 2π/ω1
= (с);
дейст
= 2π/ω1
= (с);
μt = tдейст/[0-6] = (с/мм);
μυ = μS/H1μt= (м/с/мм);(2.61)
μа = μυ/H2μt =(м/с2/мм),
где: Н1, Н2– полюсные отрезки, взятые с чертежа вмм.
Для того чтобы посчитать действительные значения перемещений, скоростей и ускорений, необходимо замерить ординаты в ммна делительных отрезках и умножить на соответствующий масштабный коэффициент.
Задача 2. Метод графического интегрирования
Метод графического интегрирования- метод, обратный графическому дифференцированию. Позаданной диаграмме ускорениястроятся диаграммы скорости и перемещения. Если смотреть на графики снизу вверх (см. рисунок 2.12), то получатся нужные нам диаграммы. Рассмотрим на примере.
Пример.По заданной диаграмме ускорения определить максимальную скорость и максимальное перемещение методом графического интегрирования.
Задано:
диаграмма ускорения![]() ,
максимальное ускорениеаmax(м/с2), времяt(c).
,
максимальное ускорениеаmax(м/с2), времяt(c).
Определить: максимальную скоростьυmax(м/с), максимальное перемещениеSmax(м).
Решение.Перечерчиваем заданную диаграмму ускорения в произвольном масштабе (рисунок 2.13), при этом высотуhвыбираем произвольно. Высчитываем масштабные коэффициенты ускорения и времени
μа
= аmax/
h= (![]() );.
);.
μt
= t/
[0÷6]= (![]() ),
),
где [0÷6]– отрезок оси времени вмм.
Строим диаграмму скорости методом графического интегрирования. Для этого слева от оси ординат выбираем произвольно полюсное расстояние Н1(чем больше Н1тем положе и ниже будет график скорости).

Р
t
Делим участки [0÷1], [1÷2] [2÷3] и т.д. пополам, проводим вверх до пересечения с графиком и соединяем с полюсом Р1. Полученные линии параллельно переносим на соответствующие участки диаграммы скорости. Аналогично строим диаграмму перемещения.
Масштабные коэффициенты диаграмм будут рассчитываться по следующим формулам:
μ V
= μaμtH1
= (м/с/мм);
(2.62)
V
= μaμtH1
= (м/с/мм);
(2.62)
μS= μVμtH2 = (м/мм),
где H1,H2– полюсные расстояния, замеренные с диаграмм вмм.
Определяем максимальные действительные значения скорости и перемещения
υmax = h·μV=(м/с);Smax = h·μS=(м).
Более подробно построение диаграмм этим методом будет рассказано в главе 4, §1, п. 1.4.
Итак, мы рассмотрели кинематическое исследование плоских рычажных механизмов графоаналитическими методами. Это позволяет представить движение отдельных точек звеньев механизма более наглядно. Теперь приступим к изучению работы механизма под действием заданных сил.
Вопросы для самопроверки
Постройте в крайних положениях выходного звена кривошипно-ползунный механизм, шарнирный четырехзвенный и кулисный механизмы.
Расскажите о преимуществах и недостатках определения скоростей и ускорений методом планов.
Укажите порядок построения планов скоростей и ускорений в многозвенном механизме.
Расскажите, как, пользуясь планом скоростей, определить величину и направление угловой скорости звена?
Как, пользуясь планом ускорений, определить величину и направление углового ускорения?
Объясните правило подобия для определения скорости (ускорения) какой-либо точки звена.
При каких движениях звена возникает кориолисово ускорение? Как определить его величину и направление?
Расскажите о преимуществах и недостатках определения скоростей и ускорений методом построения кинематических диаграмм.
Какие характерные точки позволяют проверить правильность построения диаграмм?