

2.3. Побудова планів прискорень для двох положень механізму
Визначимо прискорення точки А. Через те, що кривошип обертається рівномірно, точка А має тільки нормальне прискорення, яке напрямлене вздовж ланки О1А до центра обертання. Значення цього прискорення:
![]()
Приймемо
довжину відрізка
![]() ,
який зображає вектор прискорення точки
А
таким, що дорівнює 143,5 мм.
Тоді масштаб плану прискорень:
,
який зображає вектор прискорення точки
А
таким, що дорівнює 143,5 мм.
Тоді масштаб плану прискорень:
![]() .
.
З довільної точки
![]() ,
яка прийнята за полюс плану прискорень,
відкладаємо паралельно ланці
вектор
,
яка прийнята за полюс плану прискорень,
відкладаємо паралельно ланці
вектор
![]() (див. аркуш 1 (додаток А) або рис. 2.2).
(див. аркуш 1 (додаток А) або рис. 2.2).
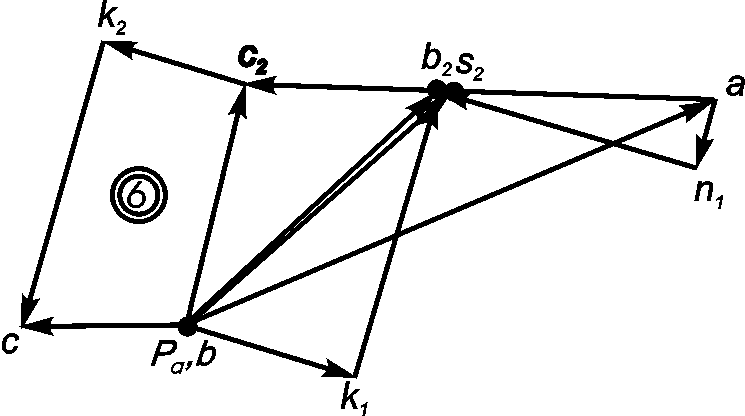
Рис. 2.2. План прискорень для шостого положення механізму
Прискорення точки В дорівнює нулю, отже, точка В збігається з полюсом плану прискорень.
Розглянемо рух точки
![]() з кулісою АС
і каменем 3 та
складемо векторні рівняння:
з кулісою АС
і каменем 3 та
складемо векторні рівняння:
 (2.4)
(2.4)
де
![]() – вектор нормального прискорення точки
при обертанні ланки 2
відносно точки А,
має напрям уздовж ланки до умовного
центра обертання A;
– вектор нормального прискорення точки
при обертанні ланки 2
відносно точки А,
має напрям уздовж ланки до умовного
центра обертання A;
![]() – вектор
дотичного прискорення точки В2
при
обертанні ланки 2
відносно точки A;
– вектор
дотичного прискорення точки В2
при
обертанні ланки 2
відносно точки A;
![]() – вектор
коріолісового (поворотного) прискорення
точки В2
відносно точки В;
– вектор
коріолісового (поворотного) прискорення
точки В2
відносно точки В;
![]() – вектор
відносного (релятивного) прискорення
точки В2
відносно точки В.
– вектор
відносного (релятивного) прискорення
точки В2
відносно точки В.
Напрям
вектора
визначається напрямом вектора відносної
швидкості
![]() ,
що повернений на 90° в бік обертання
куліси (правило М.Є. Жуковського).
,
що повернений на 90° в бік обертання
куліси (правило М.Є. Жуковського).
Визначаємо значення нормального і коріолісового прискорень:
![]() ;
;
![]() .
.
Тоді відрізки, що зображають їх на плані прискорень:
![]() ;
;
![]() .
.
Згідно з рівнянням (2.4) будуємо план прискорень і знаходимо прискорення точки , а також невідомі складові і :
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Прискорення
точки
![]() ,
яка належить кулісі, визначаємо за
теоремою подібності плану прискорень
ланці, склавши пропорцію:
,
яка належить кулісі, визначаємо за
теоремою подібності плану прискорень
ланці, склавши пропорцію:
![]() ,
,
звідки
![]() .
.
Відкладаючи відрізок
![]() на продовженні відрізка
на продовженні відрізка
![]() і, з’єднавши точку
з полюсом
,
отримаємо величину і напрям вектора
прискорення точки
:
і, з’єднавши точку
з полюсом
,
отримаємо величину і напрям вектора
прискорення точки
:
![]() .
.
Для визначення прискорення точки С, яка належить повзунам 4 і 5, складемо векторні рівняння:
 (2.5)
(2.5)
де
![]() – вектор коріолісового прискорення
точки С відносно
точки
,
напрям якого знайдемо, повернувши вектор
відносної швидкості
на 90° в бік обертання куліси;
– вектор коріолісового прискорення
точки С відносно
точки
,
напрям якого знайдемо, повернувши вектор
відносної швидкості
на 90° в бік обертання куліси;
![]() – вектор відносного
прискорення точки С
відносно точки
(має напрям уздовж куліси АВ);
– вектор відносного
прискорення точки С
відносно точки
(має напрям уздовж куліси АВ);
![]() .
.
Значення коріолісового прискорення
![]() ,
,
а довжина відрізка, який зображає його на плані прискорень
![]() .
.
Згідно з рівнянням
(2.5) від точки
на плані прискорень відкладаємо в
указаному напрямі відрізок
![]() .
Через точку
.
Через точку
![]() проводимо напрям вектора
,
а через полюс
– напрям вектора
проводимо напрям вектора
,
а через полюс
– напрям вектора
![]() ,
який паралельний напрямній повзуна 5.
Точку перетину цих напрямів позначимо
с.
,
який паралельний напрямній повзуна 5.
Точку перетину цих напрямів позначимо
с.
Вимірюємо відрізки:
![]()
![]()
Тоді
![]()
![]()
Знаючи положення центра мас S2 на кулісі, за аналогією з планом швидкостей, знаходимо за правилом подібності точку s2 на плані прискорень. З’єднавши отриману точку s2 з полюсом плану прискорень, обчислюємо прискорення центра мас куліси:
![]()
Кутове
прискорення кривошипа
![]() ,
оскільки ця ланка обертається рівномірно.
Значення кутового прискорення куліси:
,
оскільки ця ланка обертається рівномірно.
Значення кутового прискорення куліси:
![]() .
.
Для
визначення напряму вектора
![]() переносимо вектор
у точку В.
Розглядаємо рух ланки 2 відносно точки
А. У нашому випадку вектор
має напрям вліво, отже,
напрямлене проти годинникової стрілки.
переносимо вектор
у точку В.
Розглядаємо рух ланки 2 відносно точки
А. У нашому випадку вектор
має напрям вліво, отже,
напрямлене проти годинникової стрілки.
Плани прискорень в інших положеннях механізму будуються аналогічно. Отримані значення відрізків, які зображають вектори прискорень, та їх значення наведено у табл. 2.2.
Таблиця 2.2