

Кінематичні пари механізму
Позначення кінематичної пари |
Номери ланок, які утворюють кінематичну пару |
Характер відносного руху ланок |
Клас кінематичної пари |
О1 А В В С С D |
0–1 1–2 0–3 2–3 2–4 4–5 5–0 |
Обертальний Обертальний Обертальний Поступальний Поступальний Обертальний Поступальний |
V V V V V V V |
За формулою П.Л. Чебишева [1, 2, 3, 11] визначимо ступінь рухомості механізму:
![]() (1.1)
(1.1)
де
![]() – кількість рухомих ланок механізму;
– кількість рухомих ланок механізму;
![]() – кількість
кінематичних пар V класу;
– кількість
кінематичних пар V класу;
![]() – кількість
кінематичних пар ІV класу.
– кількість
кінематичних пар ІV класу.
Оскільки
![]() ,
тоді в даному механізмі має бути одна
початкова ланка. За початкову згідно з
технічним завданням приймаємо ланку
1.
Розкладаємо механізм на структурні
групи Ассура. Перш за все відокремлюємо
ланцюг, який складається з двох ланок
4,
5
і трьох кінематичних пар (С,
С,
D),
які утворюють групу II класу другого
порядку ІV виду (рис. 1.1, в).
Далі відокремлюємо ланцюг, який
складається з ланок 2,
3
(рис. 1.1, б)
і трьох кінематичних пар (А,
В,
В).
Ця група є групою II класу другого порядку
III виду. Кривошип 1
разом зі стояком 0
утворюють механізм І класу (рис. 1.1, а).
,
тоді в даному механізмі має бути одна
початкова ланка. За початкову згідно з
технічним завданням приймаємо ланку
1.
Розкладаємо механізм на структурні
групи Ассура. Перш за все відокремлюємо
ланцюг, який складається з двох ланок
4,
5
і трьох кінематичних пар (С,
С,
D),
які утворюють групу II класу другого
порядку ІV виду (рис. 1.1, в).
Далі відокремлюємо ланцюг, який
складається з ланок 2,
3
(рис. 1.1, б)
і трьох кінематичних пар (А,
В,
В).
Ця група є групою II класу другого порядку
III виду. Кривошип 1
разом зі стояком 0
утворюють механізм І класу (рис. 1.1, а).
У цілому механізм, який розглядаємо, є механізмом II класу. Для такого механізму можна записати формулу будови:
І(0, 1)→ІІ(2, 3) →ІІ(4, 5),
де цифрою І позначено механізм першого класу, цифрою II – клас групи

Рис. 1.1. Схеми механізму І класу (а) та груп Ассура ІІ класу другого порядку ІІІ (б) і IV (в) видів
Ассура. Номери ланок, що входять до складу механізму І класу та груп, взято у дужки.
2. Кінематичний аналіз шарнірно-важільного механізму
2.1. Побудова дванадцяти положень механізму
Кінематичну схему механізму будуємо в масштабі:
![]() ,
,
де
![]() –
дійсна довжина кривошипа О1А,
м;
–
дійсна довжина кривошипа О1А,
м;
![]() – довжина
відрізка в мм,
який зображає кривошип
на плані механізму.
– довжина
відрізка в мм,
який зображає кривошип
на плані механізму.
Інші відрізки кінематичної схеми:
![]()
![]()
![]() .
.
Побудову
кінематичної схеми починаємо з елементів
нерухомої ланки. З точки О1
(аркуш 1 (додаток А)) проводимо траєкторію
центра шарніра А.
Приймаємо положення
![]() кривошипа 1,
для якого
кривошипа 1,
для якого
![]() і повзун 5
знаходиться в крайньому лівому положенні,
за початкове і будуємо дванадцять
рівновіддалених положень кривошипа.
Через отримані точки
і повзун 5
знаходиться в крайньому лівому положенні,
за початкове і будуємо дванадцять
рівновіддалених положень кривошипа.
Через отримані точки
![]() проводимо прямі
проводимо прямі
![]() ,
які визначають положення всіх інших
ланок. Методом засічок знаходимо
положення центра мас
,
які визначають положення всіх інших
ланок. Методом засічок знаходимо
положення центра мас
![]() куліси 2.
З’єднавши отримані точки плавною
кривою, одержимо траєкторію
точки
.
куліси 2.
З’єднавши отримані точки плавною
кривою, одержимо траєкторію
точки
.
Будуємо
ще одне положення механізму, у якому
повзун 5 знаходиться в крайньому правому
положенні
![]() .
.
2.2. Побудова планів швидкостей для дванадцяти положень механізму
Побудову планів
швидкостей розглянемо на прикладі
шостого положення механізму. З полюса
![]() (див. аркуш 1 (додаток А) або рис. 2.1)
плану швидкостей за напрямом обертання
кривошипа перпендикулярно
відкладаємо в масштабі вектор швидкості
точки А,
величина якого:
(див. аркуш 1 (додаток А) або рис. 2.1)
плану швидкостей за напрямом обертання
кривошипа перпендикулярно
відкладаємо в масштабі вектор швидкості
точки А,
величина якого:
![]() ,
,
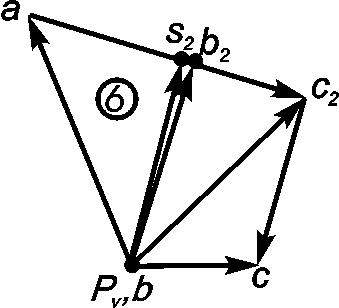
Рис. 2.1. План швидкостей для шостого положення механізму
де
![]() –кутова швидкість кривошипа,
–кутова швидкість кривошипа,
![]() .
.
Приймаємо
довжину відрізка, який зображає вектор
швидкості точки А,
![]() Тоді масштаб плану швидкостей:
Тоді масштаб плану швидкостей:
![]() .
.
Швидкість точки B2, яка лежить на кулісі АС і в даний момент збігається з точкою В, що належить каменю 3 чи стояку 0, визначаємо з рівнянь:
![]() (2.1)
(2.1)
З точки а
проводимо напрям вектора відносної
швидкості
![]() (перпендикулярно
до АВ), а через
те, що
(перпендикулярно
до АВ), а через
те, що
![]() ,
то з полюса
проводимо напрям вектора швидкості
,
то з полюса
проводимо напрям вектора швидкості
![]() (паралельно АВ).
Точка перетину цих ліній і є шукана
точка
(паралельно АВ).
Точка перетину цих ліній і є шукана
точка
![]() ,
а відрізки
,
а відрізки
![]() і
і
![]() відповідно у масштабі
відповідно у масштабі
![]() зображають вектори швидкостей
зображають вектори швидкостей
![]() і
,
тобто:
і
,
тобто:
![]()
![]() .
.
Для визначення швидкості точки С2, яка належить кулісі 2 і в даний момент збігається з точкою С, що належить ланкам 4 і 5, використаємо теорему подібності плану швидкостей ланці, на підставі якої можна скласти пропорцію:
![]() .
.
Тоді
![]() .
.
Відклавши
від точки а
на продовженні відрізка
відрізок
![]() ,
знаходимо положення точки
,
знаходимо положення точки
![]() ,
поєднавши яку з полюсом
,
отримаємо в масштабі
швидкість точки С2:
,
поєднавши яку з полюсом
,
отримаємо в масштабі
швидкість точки С2:
![]() .
.
Швидкість
точки С,
яка належить повзунам 4
і 5,
можна виразити через швидкості точок
С2
і С0.
Вектор швидкості точки С2
відомий за величиною і за напрямом;
швидкість точки С0,
що належить стояку і також збігається
з точкою С,
![]() .
Тоді можна записати векторні рівняння:
.
Тоді можна записати векторні рівняння:
![]() (2.2)
(2.2)
На
плані швидкостей з точки
проводимо паралельно кулісі АС
пряму, яка визначає напрям швидкості
![]() ,
а з полюса
проводимо лінію паралельну напрямній,
що визначає напрям швидкості точки С
відносно стояка. Відрізки
,
а з полюса
проводимо лінію паралельну напрямній,
що визначає напрям швидкості точки С
відносно стояка. Відрізки
![]() і
і
![]() у масштабі
зображають вектори швидкостей:
у масштабі
зображають вектори швидкостей:
![]()
![]() .
.
Для визначення швидкості центра мас S2 куліси використаємо теорему подібності плану швидкостей ланці, склавши пропорцію:
![]() , (2.3)
, (2.3)
з якої знаходимо
![]() .
.
З’єднавши точку
![]() з полюсом плану швидкостей, отримаємо
відрізок
з полюсом плану швидкостей, отримаємо
відрізок
![]() ,
який у масштабі
визначає значення швидкості:
,
який у масштабі
визначає значення швидкості:
![]() .
.
Значення кутової швидкості куліси знаходимо за формулою
![]() .
.
Щоб визначити напрям
кутової швидкості
![]() ,
розглянемо обертання ланки 2
відносно точки А.
Напрям руху точки В2
відносно точки А
визначається вектором швидкості
.
Подумки переносимо цей вектор у точку
В механізму
і вважаємо точку А
нерухомою. Отже, ланка АС
відносно точки А
обертається за годинниковою стрілкою.
,
розглянемо обертання ланки 2
відносно точки А.
Напрям руху точки В2
відносно точки А
визначається вектором швидкості
.
Подумки переносимо цей вектор у точку
В механізму
і вважаємо точку А
нерухомою. Отже, ланка АС
відносно точки А
обертається за годинниковою стрілкою.
Плани швидкостей для інших положень механізму будуємо аналогічно (див. аркуш 1 (додаток А)). Отримані значення відрізків, які зображають вектори швидкостей, і значення швидкостей наведені у табл. 2.1.
Таблиця 2.1
Визначення швидкостей різних точок і ланок механізму
Позначення |
Положення механізму |
|||||||||||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
|
70,70 |
64,00 |
43,50 |
19,00 |
6,50 |
32,00 |
55,30 |
68,00 |
67,00 |
40,00 |
15,00 |
53,00 |
|
1,60 |
0,96 |
0,65 |
0,28 |
0,10 |
0,48 |
0,83 |
1,02 |
1,01 |
0,60 |
0,22 |
0,80 |
|
0,00 |
31,50 |
56,50 |
68,00 |
70,00 |
63,00 |
44,00 |
17,50 |
24,50 |
58,50 |
68,50 |
40,50 |
|
0,00 |
0,47 |
0,85 |
1,02 |
1,05 |
0,95 |
0,66 |
0,26 |
0,37 |
0,88 |
1,03 |
0,61 |
|
70,70 |
69,00 |
58,50 |
46,50 |
42,50 |
51,50 |
64,00 |
70,00 |
71,00 |
78,50 |
93,00 |
76,00 |
|
1,06 |
1,03 |
0,88 |
0,70 |
0,64 |
0,77 |
0,96 |
1,05 |
1,07 |
1,12 |
1,39 |
1,14 |
|
0,00 |
26,50 |
40,00 |
41,50 |
41,50 |
40,00 |
33,50 |
16,00 |
25,00 |
76,00 |
92,00 |
51,00 |
|
0,00 |
0,40 |
0,60 |
0,62 |
0,62 |
0,60 |
0,50 |
0,24 |
0,37 |
1,14 |
1,38 |
0,76 |
|
70,70 |
55,00 |
34,00 |
14,00 |
5,30 |
21,00 |
45,50 |
62,50 |
76,00 |
54,50 |
23,00 |
75,00 |
|
1,06 |
0,83 |
0,51 |
0,21 |
0,08 |
0,32 |
0,68 |
0,94 |
1,14 |
0,82 |
0,35 |
1,12 |
|
70,70 |
63,50 |
43,50 |
22,00 |
12,50 |
33,00 |
55,00 |
68,50 |
68,00 |
56,00 |
61,00 |
62,50 |
|
1,06 |
0,95 |
0,65 |
0,33 |
0,19 |
0,49 |
0,83 |
1,03 |
1,02 |
0,84 |
0,92 |
0,94 |
|
0,00 |
1,41 |
2,23 |
2,50 |
2,54 |
2,38 |
1,83 |
0,85 |
1,48 |
4,37 |
5,44 |
2,73 |