

Зависимость коэффициента потребляемой мощности от нагрузки (рис. 6.59)
Рис. 6.59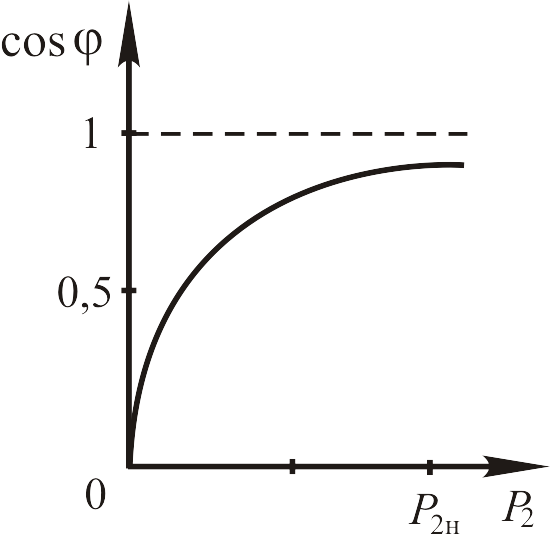
Изменение
коэффициента потребляемой мощности
![]() при изменении нагрузки может быть
достаточно просто проанализировано с
помощью круговой диаграммы, проследив
изменение угла
при изменении тока
от
до номинального значения.
при изменении нагрузки может быть
достаточно просто проанализировано с
помощью круговой диаграммы, проследив
изменение угла
при изменении тока
от
до номинального значения.
Зависимость потребляемой двигателем мощности от выходной мощности
Рис. 6.60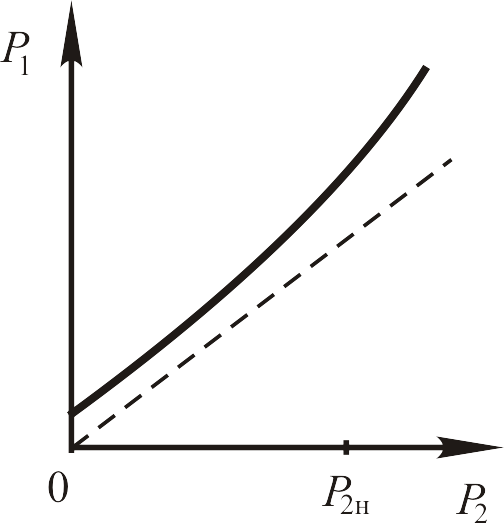
![]() нелинейная. Общий вид характеристики
представлен на рис. 6.60. Пунктирной
линией показана характеристика идеального
двигателя, КПД которого равняется
единице.
нелинейная. Общий вид характеристики
представлен на рис. 6.60. Пунктирной
линией показана характеристика идеального
двигателя, КПД которого равняется
единице.
Зависимость скольжения двигателя от выходной мощности
Скольжение идеального двигателя, работающего в режиме холостого хода, равно нулю. Электромагнитная мощность реального двигателя, работающего в режиме холостого хода, не равняется нулю, так как для преодоления механического момента трения и на дополнительные потери требуется энергия. Кроме этого, потери мощности в обмотке ротора не равны нулю. На основании этого можно утверждать, что характеристика скольжения берет свое начало не из нуля. При увеличении нагрузки двигателя скольжение увеличивается практически пропорционально выходной мощности (рис. 6.61).
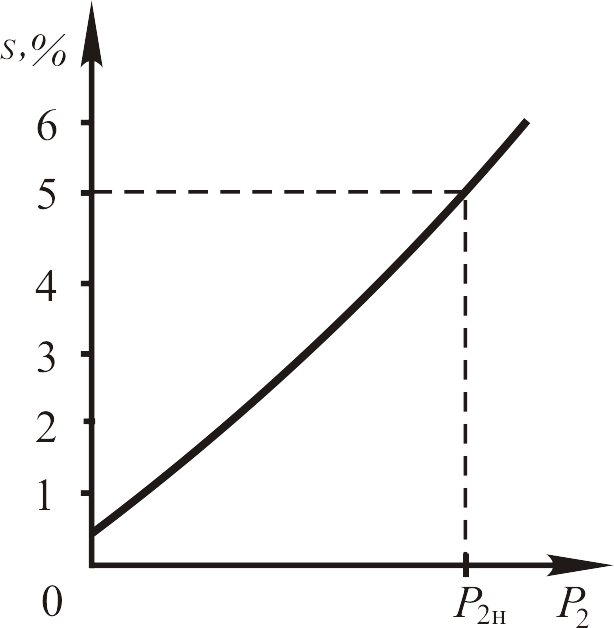
Рис. 6.61
При номинальной выходной мощности скольжение большинства двигателей составляет 4…6 %.
6.24. Работа асинхронного двигателя в различных режимах
В
ряде случаев возникает необходимость
в быстром торможении асинхронного
двигателя. Наиболее простым способом
торможения является торможение
противовключением. Торможение
противовключением заключается в том,
что с помощью аппаратов управления и
коммутации статорной обмотки получают
изменение направления вращения магнитного
поля машины. Достаточно просто этого
достигают изменением порядка следования
фаз. При изменении направления вращения
поля ротор за счет сил инерции продолжает
вращаться в прежнем направлении, т. е.
против поля. Скольжение будет больше
единицы, так как при измененном направлении
вращения ротора скорость ротора будет
отрицательной и
![]() .
.
На рис. 6.62 приведена полная механическая характеристика асинхронного двигателя.

Рис. 6.62
Для
стабильной работы двигателя необходимо
иметь увеличение момента с увеличением
скольжения. Поэтому областью устойчивой
работы двигателя является область
механической характеристики при
скольжениях от 0 до
![]() .
Далее при скольженьях
.
Далее при скольженьях
![]() характеристика является неустойчивой
и двигатель не может работать устойчиво
в этом режиме.
характеристика является неустойчивой
и двигатель не может работать устойчиво
в этом режиме.
Область отрицательных значений скольжения соответствует режиму, когда ротор вращается быстрее магнитного поля. Момент на валу отрицательный, и машина отдает энергию в сеть, т. е. работает в режиме генератора. Механический момент на валу асинхронного двигателя будет отрицательным тогда, когда нагрузка двигателя вращает его ротор, отдавая ему механическую энергию.
При скольжениях, больших единицы , ротор вращается против магнитного поля и затормаживается моментом в соответствии с характеристикой. Для увеличения эффективности торможения в цепь ротора двигателя с фазным ротором включают дополнительные сопротивления, переходя на искусственные характеристики, обеспечивающие наибольший тормозной момент.