

(Заблоковані колеса зафарбовані).
В США і Канаді для запобігання складанню автопоїздів використовується пристрій Бріз Джек-Найф Контролс фірми Брід Корпорейшнс (США), схема якого наведена на рис. 3.2.
Пристрій являє собою пневматичний гальмівний механізм з підпружиненим тросовим барабаном, закріпленим під напівпричіпом (причіпом) і з'єднаний з сідловин тягачем або з підкотним візком (або з поворотним візком) за допомогою керуючого тросу.
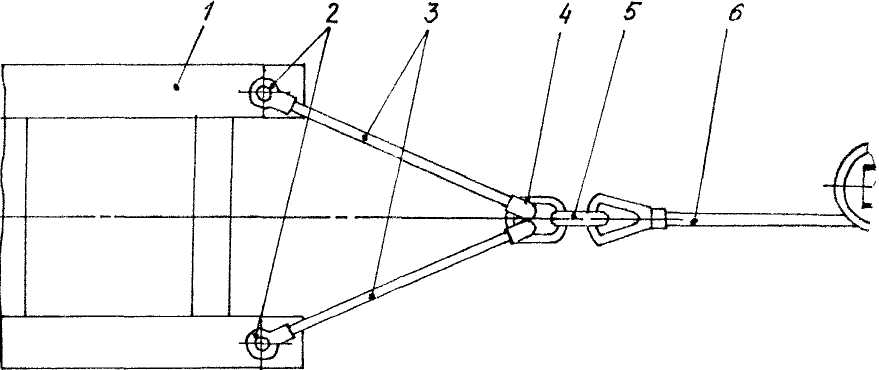
Рис. 3.2 Схема пристрою Бріз Джек-Найф Контрол фірми Бріз Корпорейшнс (США):
1 - рама тягача (підкотного або поворотного візка);
2 - упори; 3 - троси; 4 - кільце; 5 - гак; 6 - керуючий трос.
До спрацювання робочої гальмівної системи барабан пристрою вільно обертається, натягуючи трос з деяким зусиллям і дозволяє ланкам автопоїзда повертатись відносно один одного на любий кут. При гальмуванні автопоїзда барабан загальмовується і не дає розмотуватись тросу, фіксуючи взаємне положення ланок автопоїзда, яке вони займали в момент спрацювання гальмівної системи.
На рис. 3.3 приведені залежності курсового кута Ώт автомобіля-тягача від швидкості початку гальмування Vo при наявності 15%-ої осьової нерівномірності гальмових сил.
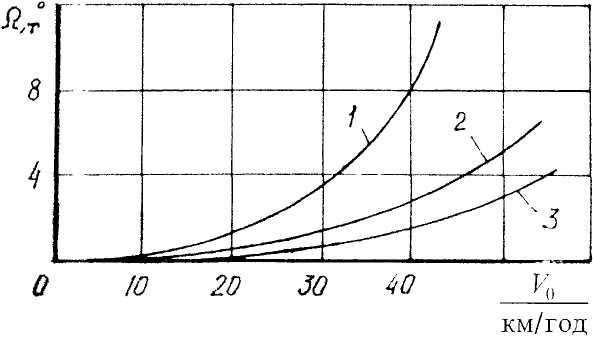
Рис. 3.3 Залежність курсового кута автомобіля-тягача від початкової швидкості
гальмування:
1 - одноконтурний привід; 2 - електропневмопривід; 3 - двоконтурний привід.
Застосування двоконтурного і електропневмоприводу суттєво збільшують стійкість автопоїзда. Це пов'язано зі зменшенням повздовжніх зусиль при набіганні причіпів через менший час спрацювання при використанні електропневмопроводу і більших значень питомих гальмових сил при двоконтурному приводі.
3.2.3 Керованість
Керованість - це властивість конструкції (автопоїзда) реалізувати заданий режим руху і сприймати сигнали керування з необхідною точністю і швидкістю при мінімальному рівні моторних затрат із сторони водія. Керованість - це комплексний параметр.
Режими, що оцінюють керованість автопоїзда:
1) "Ривок керма" (рульове колесо швидко повертають з нейтрального положення).
Фіксують: максимальний кут повороту керма, швидкість повороту, швидкість руху.
Перевіряють: кут, на який заводить автомобіль-тягач.
2) Стабілізація (тобто рульове колесо звільняється в повернутому положенні)
Фіксують: радіус повороту та швидкість руху.
Перевіряють: швидкість самоповороту керма; кут, на який не доповернулося кермо та інші параметри.
На рис. 3.4.а наведені варіанти дво- і трьохланкові варіанти автопоїздів, які складаються із стандартних напівпричіпів.
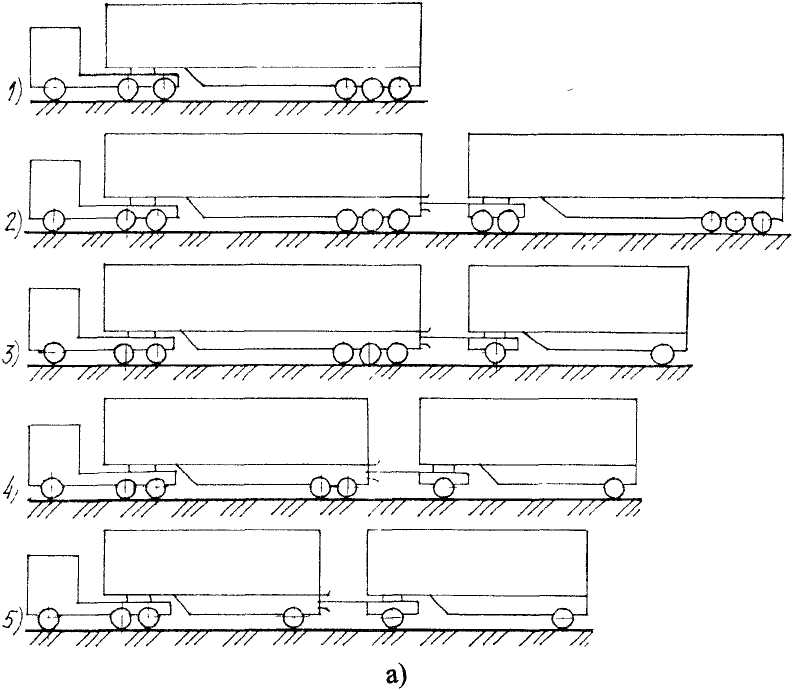
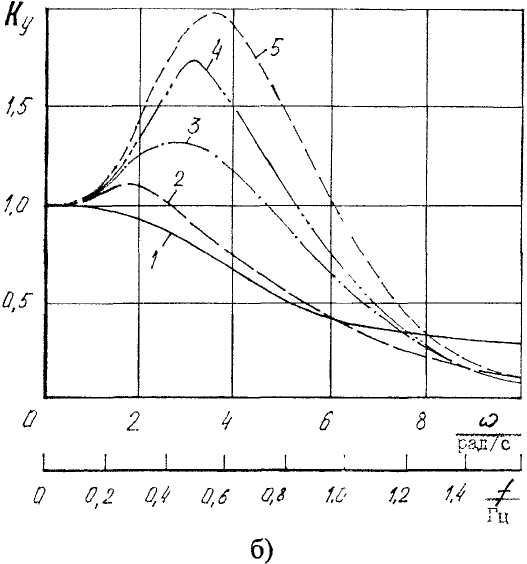
Рис. 3.4 Залежність Ку від кутової швидкості ω, рад/с рульового колеса і частоти впливу ƒ на рульове колесо автопоїздів:
1 - МАЗ-6422+9398;
2 - МАЗ-6422+9398+9398;
3 - МАЗ-6422+9398+9380;
4 - МАЗ-6422+9397+9380;
5 -МАЗ-6422+9380+9380.
Наведені залежності коефіцієнта підсилення бокового прискорення Ку від кутової швидкості ω, рад/с рульового колеса і частоти впливу ƒ на нього (див. рис. 3.4.6). Коефіцієнт підсилення бокового прискорення - це відношення максимального бокового прискорення останньої ланки автопоїзда до бокового прискорення автомобіля-тягача. Ку більший у трьохланкових автопоїздів, ніж у дволанкових.
Такий ефект здійснює негативний вплив на керованість автопоїзда, оскільки водій при виборі режиму руху орієнтується на бокове прискорення автомобіля-тягача і не має інформації про третю ланку, що в критичних ситуаціях може призвести до її заносу або перекидання. Найбільше значення Ку мають трьохланкові автопоїзди, що сформовані із напівпричіпів або причіпів з короткою базою.
Для зниження вказаного ефекту використовують чотирьохланкові зчіпні пристрої (та інші). Схема такого пристрою показана на рис. 3.5.
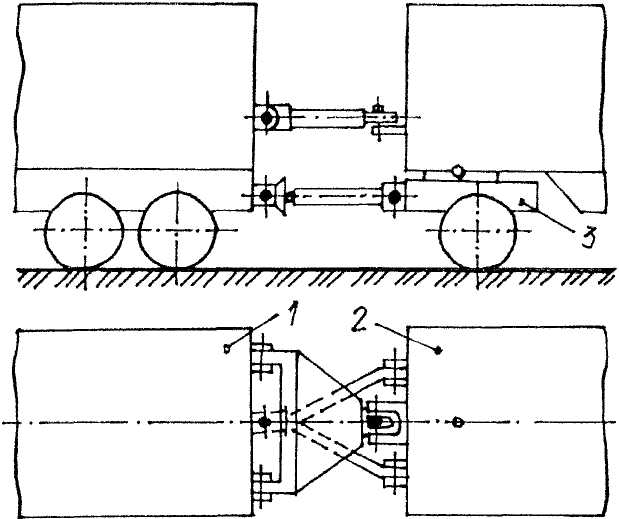
Рис. 3.5 Схема пристрою для вирівнювання кутів крену ланок автопоїзда:
1 і 2 - перший і другий причіпи;
3 - підкотний візок
Результати досліджень автопоїздів із різними зчіпними пристроями наведені на рис. 3.6.
Таким чином, з'являється можливість достатнього рівня керованості трьохланкових автопоїздів.
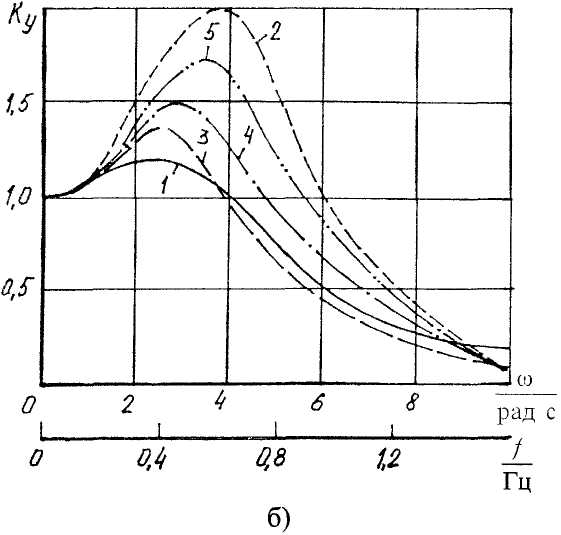
Рис. 3.6 Залежність Ку від кутової швидкості ω,рад/с і частоти впливу ƒ на рульове колесо автопоїздів різної компоновки:
1 - дволанкового;
2 - трьохланкового сідлово-причіпного;
3 - трьохланкового сідлового;
4 - із зчепленням типу "шарнірний
чотирьохланковий";
5-з пристроєм вирівнювання кутів