

1.3.4. Система стабилизации скорости движения автомобиля замкнутого типа.
I:
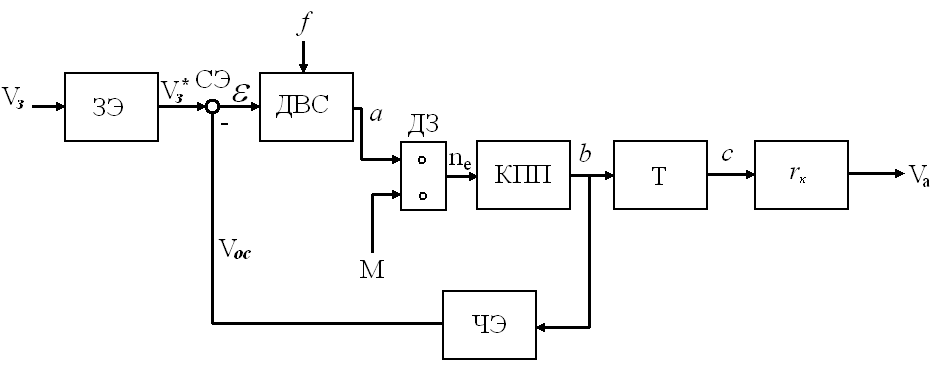
S: В системе стабилизации скорости движения автомобиля замкнутого типа, показанной на рисунке, элемент, формирующий сигнал заданной скорости движения автомобиля, является элементом с номером

+: 1 -: 2 -: 3 -:4
I:
S: В системе стабилизации скорости движения автомобиля замкнутого типа, показанной на рисунке, элемент, определяющий рассогласование между заданной и фактической скоростью движения автомобиля, является элемент с номером
+: 2 -:1 -: 3 -:4
I:
S: В системе стабилизации скорости движения автомобиля замкнутого типа, показанной на рисунке, элемент ЧЭ является
+: чувствительным элементом, измеряющим скорость движения автомобиля
-: чувствительным элементом к возмущениям, обусловленным составом топливно-воздушной смеси, вязкостью масла, углом опережения зажигания
-: чувствительным элементом, измеряющим тормозящий момент со стороны трансмиссии автомобиля
I:
S: В системе стабилизации скорости движения автомобиля замкнутого типа показанной на рисунке, сигнал Vз (заданная скорость движения автомобиля) является воздействием с номером

+: 2 -: 1 -: 3 -: 11
I:
S: В системе стабилизации скорости движения автомобиля замкнутого типа, показанной на рисунке, сигнал (рассогласование между сигналами заданной и фактической скоростью движения автомобиля) является сигналом с номером
+: 4 -: 1 -: 3 -: 11
I:
S: В системе стабилизации скорости движения автомобиля замкнутого типа, показанной на рисунке, сигналом обратной связи является сигнал с номером
+: 10
-: 3
-: 4
-: 11
I:
S: В системе стабилизации скорости движения автомобиля замкнутого типа сигнал равный Vз*-Vос это
+: рассогласование между сигналами заданной и фактической скоростью движения автомобиля
-: задающее воздействие
-: превалирующее возмущение
-: второстепенное возмущение
I:
S: Если в системе стабилизации скорости движения автомобиля замкнутого типа, показанной на рисунке, коэффициент передачи элемента ЧЭ равен 1, то сигнал равный VзКзэ-Vос - это сигнал
+: -: M -: Vа -: a
I:
S: Если в системе стабилизации скорости движения автомобиля замкнутого типа, показанной на рисунке, коэффициент передачи звена ДВС равен Кдвс, то сигнал а равен
+: (VзКзэ-Vос)fKдвс
-: VзKзэVосfKдвс
-: (Vз-Kзэ)VосfKдвс
-:(VзKзэ-Vосf)Kдвс
I:
S: В системе стабилизации скорости движения автомобиля замкнутого типа, показанной на рисунке сигнал ne- частота вращения коленчатого вала двигателя равна
+:
![]()
-:
![]()
-:
![]()
-:
![]()
I:
S: Если в системе стабилизации скорости движения автомобиля замкнутого типа, показанной на рисунке, звенья T, rk, ЧЭ имеют соответствующие коэффициенты передачи КT , Krk, Kчэ то сигнал обратной связи Vос равен
+:![]() -:
-:
![]() -:
-:
![]() -:
-:
![]()
I;
S: Если коэффициент передачи звена ЗЭ равен Кзэ, то в системе стабилизации скорости движения автомобиля замкнутого типа, показанной на рисунке, сигнал Vз* заданная скорость движения равна
+: VзKзэ -:Vз-Kзэ -: Vз/Kзэ -: Vз+Kзэ
I;
S: Рассогласование между заданной и фактической скоростью движения автомобиля в системе управления, показанной на рисунке, равно
+:
![]() -:
-:![]() -:
-:
![]() -:
-:
![]()
I:
S: В системе стабилизации скорости движения автомобиля, показанной на рисунке, регулируемая величина Va равна
+:
-:
![]()
-:
![]()
I:
S: В системе стабилизации скорости движения автомобиля показанной на рисунке, регулируемая величина Va равна
+:
![]()
-:
![]()
-:
![]()
I:
S: В системе стабилизации скорости движения автомобиля, показанной на рисунке, регулируемая величина Va равна
+:
![]()
-:
![]()
-:
![]()
I:
S: В системе стабилизации скорости движения автомобиля, показанной на рисунке, регулируемая величина Va равна
+:
-:

-:

I:
S: Целью управления в системе стабилизации скорости движения автомобиля является
+: Vа=Vз=const
-: Vз=M/f
-: Vа= M/f
-: Va = Mf=const
I:
S:
Для достижения цели управления
Vа=Vз=const
в системе
стабилизации скорости движения
автомобиля, где скорость движения равна
 ,
необходимо выполнить неравенство
,
необходимо выполнить неравенство
+:
![]()
-:
![]()
-:
![]()
-:
![]()
I:
S: В системе стабилизации скорости движения автомобиля замкнутого типа, показанной на рисунке, целью управления может быть достигнута при выборе коэффициента передачи звена Кзэ равного
+:
![]()
-:
![]()
-:
![]()
-:![]()
I:
S: Системе стабилизации скорости движения автомобиля замкнутого типа в отличии от подобной системы разомкнутого типа свойственно
+: большая колебательность системы
-: наличие жестких требований к коэффициентам передачи системы
-: меньшая точность работы САУ
I:
S: Системе стабилизации скорости движения автомобиля замкнутого типа в отличии от подобной системы разомкнутого типа свойственно
+: отсутствие жестких требований к коэффициентам передачи звеньев
-: жесткие требования к коэффициентам передачи звеньев
-: меньшая точность работы САУ
I:
S: Системе стабилизации скорости движения автомобиля замкнутого типа в отличии от подобной системы разомкнутого типа свойственно
+: большая точность работы САУ
-: наличие жестких требований к коэффициентам передачи системы
-: меньшая точность работы САУ
-: меньшая колебательность САУ
I:
S: В системе стабилизации скорости движения автомобиля замкнутого типа по сравнению с подобной системой разомкнутого типа большая точность работы обеспечивается за счет
+ компенсации действия превалирующего возмущения M и второстепенных возмущений f
- большей стабильностью коэффициентов передачи
- меньшей колебательностью САУ
I:
S: К особенностям работы системы стабилизации скорости движения замкнутого типа относятся
-: зависимость регулируемой величины от превалирующего возмущения М и второстепенных возмущений f
-: зависимость регулируемой величины от второстепенных возмущений f и независимость от превалирующего возмущения M
+: независимость регулируемой величины от превалирующего возмущения М и второстепенных возмущений f
-: зависимость регулируемой величины от превалирующего возмущения M и независимость от второстепенных возмущений f
I:
S: Между система стабилизации скорости движения автомобиля и их особенностями существует соответствие
R1: CCCА замкнутого типа
R2: CCCА разомкнутого типа
L1: возможность компенсации действия большого числа возмущений
L2: изменение коэффициентов передачи звеньев соответствует действию возмущения
L3: инвариантность к второстепенному возмущению