

1. Принцип построения систем автоматического управления.
1.1. Понятие об автоматическом управлении.
1.2. Регулирование по возмущению
1.2.1. Принцип регулирования по возмущению
1.2.4. Система стабилизации скорости автомобиля разомкнутого типа.
1.3 Регулирование по отклонению
1.3.1. Принцип регулирования по отклонению
1.3.4. Система стабилизации скорости движения автомобиля замкнутого типа.
1.4. Статический режим работы
2. Математическое моделирование
систем автоматического управления элементов.
2.1. Линеаризация САУ
2.2. Типовые воздействия
2.3. Передаточные функции
2.3.1 Передаточная функция, основные определения.
Принцип суперпозиции
2.3.3 Определение передаточной функции
на примере гидромеханического демпфера
2.3.6 Определение передаточных функций тахометра, спидометра и одометра
2.3.8. Определение передаточной функции гидромеханического демпфера и RCL цепочек.
2.4. Структурные схемы САУ и их преобразование
2.4.1. Структурные схемы систем управления и их элементы
2.4.2. Передаточные функции простейших соединений звеньев
2.4.3. Определение эквивалентной передаточной функции САУ
2.5. Частотная передаточная функция
3. Анализ САУ
3. 1. Амплитудная частотная характеристика
3. 2. Фазовая частотная характеристика
3.3. Амплитудно-фазовая частотная характеристика
3.4. Логарифмические амплитудная и фазовая частотные характеристики
3.5. Переходная функция.
4. Устойчивость систем автоматического управления
4.1. Понятие устойчивости
4.2. Свойства корней характеристического уравнения
4.3. Свойства коэффициентов характеристического уравнения
4.4. Критерий устойчивости Гурвица
4.5. Критерий устойчивости Найквиста
4.6. Критерий устойчивости Михайлова
5. Качество процессов управления
5.1 Критерии качества
5.2. Передаточная функция замкнутой системы по задающему, возмущающему воздействию и ошибке
5.3. Качество процессов управления в статическом режиме
5.4 Качество процессов управления в гармоническом режиме
5.5. Показатели качества, определяемые по переходной функции системы
5.6. Корневые критерии качества
5.6.1. Степень устойчивости
5.6.2. Колебательность и затухание.
5.7 Запас устойчивости
6 Синтез систем автоматического управления
6.1. Понятие синтеза. Последовательная коррекция
6.2. Параллельная и комбинированная коррекции
6.3. Требуемая ЛАЧХ
6.4. Синтез последовательной коррекции и параллельной коррекции
7. Дискретные и импульсные САУ
8. Нелинейные системы управления
9. Оптимальные (самонастраивающиеся) САУ.
Принцип построения систем автоматического управления.
Понятие об автоматическом управлении.
I:
S: Теория автоматического управления рассматривает принципы построения автоматических систем различных типов, в которых какая либо физическая величина
+: изменяется или поддерживается на неизменном уровне
-: преобразуется в другие физические величины
-: усиливается по мощности
I:
S: Целью управления систем автоматического управления является обеспечение во времени t требуемого закона изменения
+: регулируемой величины
-: задающего воздействия
-: управляющего воздействия
-: возмущающего воздействия
I:
S: Целью управления САУ является обеспечение выполнения соотношения
+: y(t)=g(t)
-: g(t)=y(t)
-: g(t)=f(t)
-: f(t)=g(t)
I:
S: Частным случаем цели управления САУ является обеспечение выполнения соотношения
+: y(t)=gз(t)=const
-: g(t)=y(t)
-: g(t)=f(t)
-: f(t)=g(t)
I:
S: Система автоматического управления представляет собой совокупность регулятора и
+: объекта управления
-: корректирующего органа
-: исполнительного элемента
I:
S: Совокупность регулятора и объекта управления образует
+: систему автоматического управления
-: регулирующий орган
-: корректирующий элемент
I:
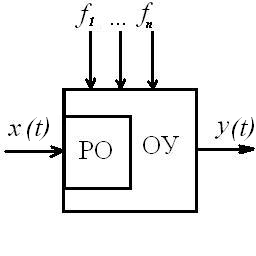
S: Если y - регулируемая величина, то объект управления в общем случае имеет вид
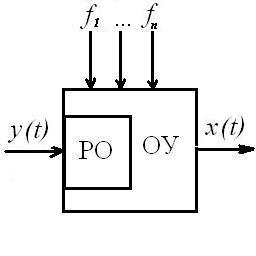
+: -: -:
I:
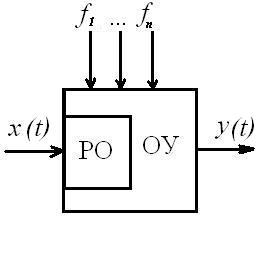
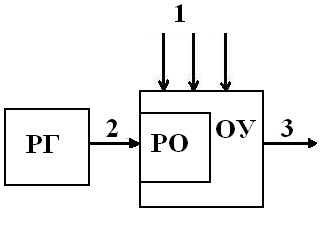
S: Структурная схема системы автоматического управления показана на рисунке
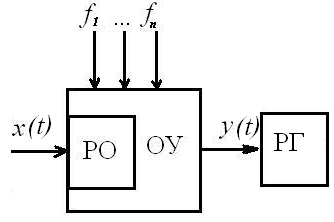
+: -: -:
I:
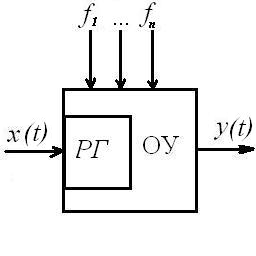
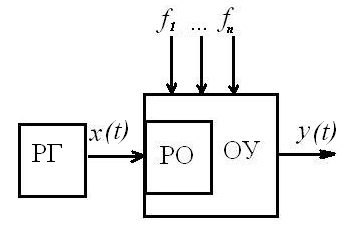
S: В САУ, структурная схема которой показана на рисунке, элемент 1 это
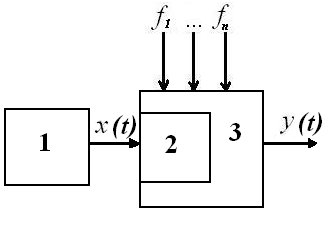
+: регулятор
-: объект управления
-: регулирующий орган
-: сравнивающий элемент
I:
S: Регулятор предназначен для
+: формирования управляющего воздействия
-: формирования регулируемой величины
-: формирование задающего воздействия
I:
S: В САУ, структурная схема которой показана на рисунке, элемент 2 это
+: регулирующий орган
-: объект управления
-: регулятор
-: чувствительный элемент
I:
S: Для компенсации действия возмущающего воздействия объект управления снабжается
+: регулирующим органом
-: исполнительным элементом
-: сравнивающим элементом
-: чувствительным элементом
I:
S: В САУ, структурная схема которой показана на рисунке, элемент 3 это
+: объект управления
-: регулирующий орган
-: регулятор
-: промежуточный элемент
I:
S: В САУ, структурная схема которой показана на рисунке, возмущающим воздействием является воздействие с номером
+: 1
-: 2
-: 3
I:
S: Возмущающими воздействиями называют причины, которые
+: отклоняют регулируемую величину от задающего воздействия
-: компенсируют регулируемую величину и задающее воздействие
-: отклоняют управляющее воздействие от регулируемой величины
I:
S: Факторы, наиболее сильно влияющие на отклонение регулируемой величины от заданного значения, называются
+: превалирующими возмущениями
-: управляющими воздействиями
-: задающими воздействиями
I:
S: В САУ, структурная схема которой показана на рисунке, управляющим воздействием является воздействие с номером
+: 2
-: 1
-: 3
I:
S: Сигнал, который формируется на выходе регулятора, называется
+ управляющим воздействием
- возмущающим воздействием
- задающим воздействием
- регулируемой величиной
I:
S: Управляющее воздействие - это воздействие, которое формируется
+: регулятором
-: регулирующим органом
-: объектом управления
-: сравнивающим элементом
I:
S: В САУ, структурная схема которой показана на рисунке, регулируемой величиной является сигналом с номером
+: 3
-: 1
-: 2
I:
S: Регулятор в САУ вырабатывает управляющее воздействие, которое обеспечивает
+: изменение регулируемой величины в соответствие с целью управления независимо от действующих возмущений
-: изменение возмущающих воздействий таким образом, чтобы они не влияли на регулируемую величину
-: изменение структуры системы для изменения регулируемой величины независимо от условий работы САУ