

1.2.4. Система стабилизации скорости автомобиля разомкнутого типа.
I:
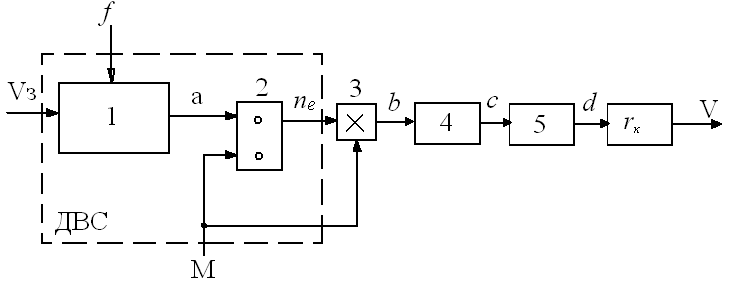
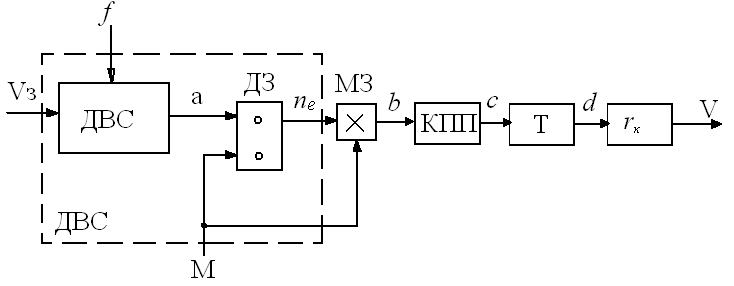
S: В системе стабилизации скорости движения автомобиля разомкнутого типа звеном, моделирующим преобразование угла открытия дроссельной заслонки в частоту вращения, является звено
+: 1 -: 2 -: 3 -: 4
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа ДЗ учитывает
+: снижение скорости вращения ДВС, при увеличении тормозящего момента со стороны трансмиссии
-: преобразование угла открытия дроссельной заслонки в частоту вращения коленчатого вала двигателя
-: изменение крутящего момента ДВС от угла открытия дроссельной заслонки
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа сигнал ne на выходе звена, моделирующего изменение частоты вращение коленчатого вала ДВС и момента на нем со стороны трансмиссии, равен
+:
![]()
-:
![]()
-: Ma
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа множительное звено моделирует
+: работу гидротрансформатора с обратной прозрачностью
-: изменение частоты вращения ДВС и момента на нем со стороны трансмиссии
-: изменение крутящего момента ДВС от угла открытия дроссельной заслонки
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа сигнал на выходе звена 3 равен
+: neМ
-:
![]()
-: ne+M
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа звеном, моделирующим работу коробки передач, является звено

+: 3 -: 1 -: 2 -: 4
I:
S: Если звено КПП, моделирующее работу коробки переменных передач, имеет коэффициент передачи (передаточное отношение) Ki, то сигнал на выходе этого звена равен
+: bKi
-: b+Ki
-: b-Ki
-:![]()
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа звеном, моделирующим работу главной передачи является звено
+: 5
-: 2
-: 3
-: 4
I:
S: Если звено Т, моделирующее работу главной передачи, имеет коэффициент передачи (передаточное отношение) Kт, то сигнал на выходе этого звена равен
+: cKт
-: с+Kт
-: с-Kт
-:![]()
I:
S: Если звено rк моделирует процесс преобразования угловой скорости вращения d полуосей в поступательное движение Va автомобиля, то сигнал на выходе этого звена равен
+: Va=2rкd
-: Va=2d+rк
-: Va=d+2rк
I:
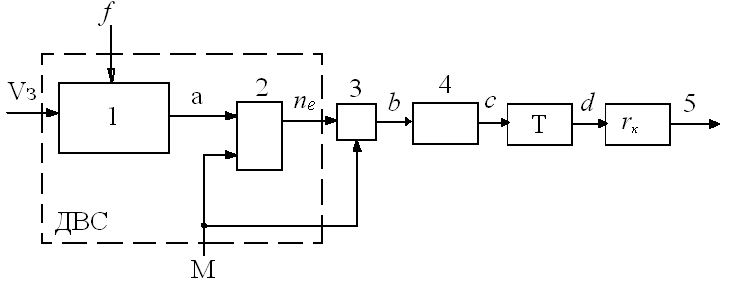
S: В системе стабилизации скорости движения автомобиля разомкнутого типа, показанной на рисунке, сигнал Vз (заданная скорость движения автомобиля) является сигналом с номером
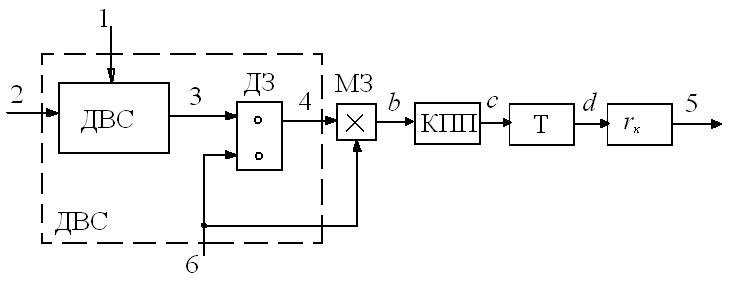
+: 2 -: 1 -: 3 -: 6
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа, показанной на рисунке, второстепенным возмущением является сигнал с номером
+: 1 –: 6 -:2 -:3
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа, показанной на рисунке, к второстепенным возмущениям f относится
-: тормозящий момент со стороны трансмиссии автомобиля
+: угол опережения зажигания
+: состав топливно-воздушной смеси
+: вязкость масла в двигателе
+: температура двигателя
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа, показанной на рисунке, частота вращения коленчатого вала двигателя это сигнал с номером
+: 4 -: 3 -: 5 -: 6
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа, показанной на рисунке, регулируемой величиной является
+: скорость движения автомобиля
-: угол открытия дроссельной заслонки
-: частота вращения коленчатого вала двигателя
-: тормозящий момент на двигателе
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа, показанной на рисунке, регулируемой величиной является сигналом с номером
+: 5
-: 4
-: 3
-: 6
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа, показанной на рисунке, превалирующим возмущением является
+: тормозящий момент M на ДВС со стороны трансмиссии
-: возмущения f, обусловленные температурой двигателя, вязкостью масла, составом топлива и т.д.
-: угол открытия дроссельной заслонки a
-: заданная скорость движения автомобиля Vз
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа, показанной на рисунке, превалирующим воздействием является сигнал с номером
+: 6 -: 1 -: 2 -: 3
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа, показанной на рисунке, возмущение f, обусловленное температурой двигателя, вязкостью масла, составом топлива, углом опережения зажигания, является
+: второстепенным возмущением
-: превалирующим возмущением
-: управляющим воздействием
-: задающим воздействием
I:
S: В системе стабилизации скорости движения автомобиля, показанной на рисунке, сигнал a равен
+: Vзf -: Vз+f -: f/Vз -:Vз-f
I:
S: В системе стабилизации скорости движения автомобиля, показанной на рисунке, сигнал ne равен
+: Vзf/М
-: VзfМ
-: М/Vзf
-: Mf/Vз
I:
S: В системе стабилизации скорости движения автомобиля, показанной на рисунке, сигнал b равен
+: Vзf М/М
-: Vзf/М2
-: М/Vзf
-: f/Vз
I:
S: В системе стабилизации скорости движения автомобиля показанной на рисунке, сигнал с равен
+: Vзf ККПП
-: Vзf/ ККПП
-: ККПП/Vзf
-: Vз/ ККППf
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа, целью управления является
+: V=Vз=const
-: V=1-Vз
-: V=Vз=var
-:ne = a/f
I:
S: В системе стабилизации скорости движения автомобиля, показанной на рисунке, регулируемая величина V равна
+: VзfККППКТrk
-: VзM ККППкТrk
-: Vзf MККППкТrk
-: f/MККППКТrk
I:
S: В системе стабилизации скорости движения автомобиля разомкнутого типа, показанной на рисунке, для обеспечения выполнения цели управления необходимо выбирать коэффициенты передачи звеньев трансмиссии равные
+: ККППКТrk=1/f
-: ККПП КТrk=f
-: ККППКТrk=f/Vз
I:
S: В разомкнутой системе стабилизации скорости движения автомобиля к стабильности коэффициентов передачи звеньев предъявляются жесткие требования, потому что
+: их изменение эквивалентно действию возмущения
-: их изменение приводит к изменению превалирующего воздействия
-: их изменение приводит к потере способности функционирования системы
-: их изменение приводит к изменению задающего воздействия
I:
S: К особенностям работы системы стабилизации скорости движения автомобиля относятся
+: зависимость регулируемой величины от второстепенного возмущения f и независимость от превалирующего воздействия M
-: независимость регулируемой величины от превалирующего воздействия М и второстепенного возмущения f
-: зависимость регулируемой величины от превалирующего воздействия М и второстепенного возмущения f
-: зависимость регулируемой величины от превалирующего воздействия M и независимость от второстепенного возмущения f