

1.3 Регулирование по отклонению
1.3.1. Принцип регулирования по отклонению
I:
S: САУ построенная по принципу регулирования по рассогласованию, также, называется
+: замкнутой САУ
-: разомкнутой САУ
-: статичной САУ
I:
S: В замкнутой САУ регулирование осуществляется по
+: рассогласованию между задающим воздействием и регулируемой величиной
-: возмущающему воздействию
-: задающему воздействию
I:
S: САУ, работающие по принципу регулирования по рассогласованию, называют замкнутыми, потому что
+: они имеют обратную связь
-: регулирование осуществляется по превалирующему возмущению
-: система не имеет сравнивающего элемента
I:
S: Рассогласования (t) в замкнутой САУ определяется по формуле
+: (t)=g(t)-y(t)
-: (t)=x(t)-y(t)
-: (t)=f(t)-g(t)
-: (t)=g(t)-x(t)
I:
S: Рассогласования (t)=g(t)-y(t), где g(t) это
+: задающее воздействие
-: регулируемая величина
-: второстепенное возмущение
-: превалирующее возмущение
I:
S: Рассогласования (t)=g(t)-y(t), где y(t) это
+: регулируемая величина
-: задающее воздействие
-: второстепенное возмущение
-: превалирующее возмущение
I:
S: Принцип регулирования замкнутой САУ состоит в формировании управляющего воздействия в зависимости от
+: рассогласования между задающим воздействием и регулируемой величиной
-: превалирующего возмущения
-: второстепенного возмущения
I:
S: Структурная схема системы автоматического управления замкнутого типа представлена на рисунке
-: +:
-:
I:
S: На структурной схеме замкнутой САУ задающий элемент это элемент с номером

+: 1
-: 2
-: 6
-: 7
I:
S: Рассогласование в замкнутой САУ формирует
+: сравнивающий элемент
-: задающий элемент
-: исполнительный элемент
-: регулирующий орган
I:
S: На структурной схеме замкнутой САУ сравнивающий элемент это элемент с номером
+: 2
-: 3
-: 6
-: 7
I:
S: На структурной схеме замкнутой САУ промежуточными элементами могут быть элементы с номерами
+: 3 и 7
-: 3 и 6
-: 6 и 7
-: 6 и 4
I:
S: На структурной схеме замкнутой САУ исполнительный элемент - это элемент с номером
+: 4 -:2 -: 6 -: 7
I:
S: В замкнутой САУ, структурная схема которой приведена на рисунке, элемент 6 - это
+: чувствительный элемент
-: исполнительный элемент
-: сравнивающий элемент
-: промежуточный элемент
I:
S: В замкнутой САУ, структурная схема которой представлена на рисунке, сигнал 3 равен

+: g(t)-y(t)
-: g(t)-f(t)
-: y(t)-g(t)
-: g(t)-x(t)
I:
S: В замкнутых САУ при увеличении ошибки рассогласования
+: регулируемая величина будет отклоняться от задающего воздействия
-: регулируемая величина будет приближаться к бесконечности
-: регулируемая величина будет стремиться к 0
-: регулируемая величина будет стремиться к фиксированному значению
I:
S: В замкнутой САУ, при отклонении регулируемой величина от заданного значения, рассогласование
+: увеличивается
-: уменьшается
-: стремиться к 0
I:
S: В замкнутых САУ при уменьшении ошибки рассогласования , регулируемая величина будет
+: стремиться к заданному значению
-: отклоняться от задающего воздействия
-: приближаться к бесконечности
-: стремиться к 0
I:
S: В замкнутой САУ, при стремлении регулируемой величины к заданному значению, рассогласование
+: стремиться к 0 -: увеличивается до -∞
-: уменьшается до -∞
I:
S: Процесс изменения регулируемой величины y(t) в замкнутой САУ показан на рисунке, где уз - заданное значение y, при этом рассогласование
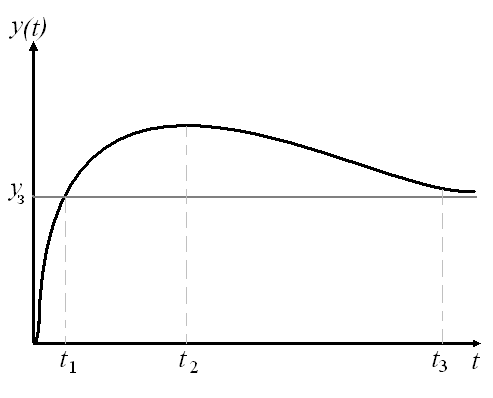
+: больше в момент t2 чем в момент t3
-: больше в момент t1 чем в момент t3
-: имеет постоянное значение
I:
S: Процесс изменения регулируемой величины y(t) в замкнутой САУ показан на рисунке, где уз - заданное значение y, при этом рассогласование =0
+: в момент t1
-: в момент t2
-: в момент t3
I:
S: Процесс изменения регулируемой величины y(t) в замкнутой САУ показан на рисунке, где уз - заданное значение y, при этом рассогласование не равно 0

+: в момент t2
-: в момент t1
-: в момент t3
I:
S: Процесс изменения регулируемой величины y(t) в замкнутой САУ показан на рисунке, где уз - заданное значение y, при этом рассогласование стремится к 0
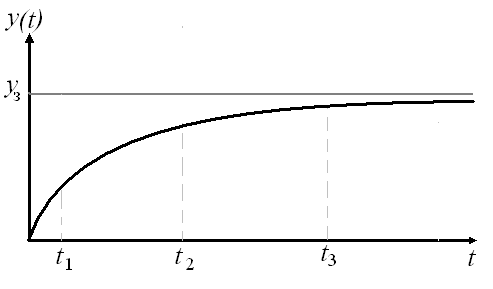
+: при t
-: при t=t1
-: при t=t2
-: при t=t3
-: при t=0
I:
S: Жесткие требования к стабильности коэффициентов передачи звеньев отсутствуют в САУ, работающей по принципу регулирования
+: отклонению
-: возмущению
-: усилению f(t)
I:
S: Более склонны к колебаниям САУ, работающие по принципу регулирования по
+: отклонению
-: возмущению
-: компенсации
I:
S: САУ, в которых компенсируется влияние нескольких возмущений это
+: замкнутые САУ
-: разомкнутые САУ
-: САУ, работающие по принципу регулирования по возмущению
I:
S: Большая точность работы замкнутых САУ по сравнению с САУ разомкнутого типа достигается за счет
+: компенсации большего количества возмущений
-: компенсации превалирующего воздействия
-: колебательности системы
-: коэффициента усиления сигнала.
I: S: Большую точность работы имеют
+: замкнутые САУ
-: разомкнутые САУ
-: САУ, в которых регулируемая величина инвариантна по отношению к превалирующему возмущению