

Пристрій реєстрації комбінованим методом:
Принцип дії та схемна реалізація пристрою реєстрації комбінованим методом (рис. 2.6.10) аналогічні пристрою реєстрації методом інтегрування. Різниця полягає в тому, що генератор реєструючих імпульсів (ГРІ2) видає відліки з такою частотою, яка б дозволила в часовому проміжку однієї посилки розмістити три реєструючих імпульси (рис. 2.6.11). Тому лічильник ЛЧ1 при реєстрації комбінованим методом видає сигнал коли налічить два імпульси, що прийшли під час позитивного рівня сигналу. На входи ЛЧ2 та ЛЧ3, на виходах яких з’являється сигнал на початку та кінці посилки відповідно, йде тактова частота від генератору реєструючих імпульсів для методу інтегрування (ГРІ1).
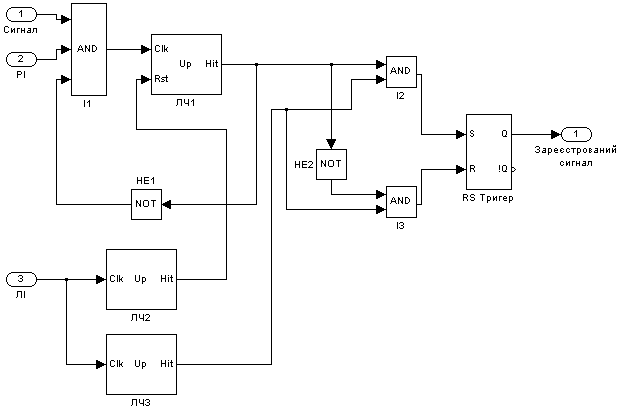
Рис. 2.6.10. Пристрій реєстрації комбінованим методом.

Рис. 2.6.11. Реєстрація сигналу комбінованим методом.
2.7. Зміст протоколу.
Схема лабораторного макету.
Формули для розрахунку теоретичної виправляючої спроможності різних схем реєстрації.
Часові діаграми сигналів в основних точках лабораторного макету.
Величини розрахованої та виміряної виправляючої спроможності для різних схем реєстрації.
Висновки по результатах роботи.
2.8. Література.
Шувалов В.П. и др. Передача дискретных сообщений. – М: Радио и связь, 1990, с.33-42.
Емельянов Г. А., Шварцман В. О. Передача дискретной информации. –М.: Радио и связь, 1982, с.39 - 43.
Гуров В. С. и др. Передача дискретной информации и телеграфия. –М.: Связь, 1974, с. 89 – 96, 103 – 105.
Принципы построения электронно-механических телеграфных аппаратов/Под ред. Б. П. Терентьева. . –М.: Связь, 1973, с. 51 – 57.
лабораторна робота №3
“ВИВЧЕННЯ СИСТЕМ ТАКТОВОЇ СИНХРОНІЗАЦІЇ”
3.1. Мета роботи:
3.1.1. Вивчити призначення і принцип роботи систем тактової синхронізації (СТС).
3.1.2. Вивчити будову і роботу схеми СТС із дискретним керуванням.
3.1.3. Вивчити методику розрахунку основних параметрів СТС.
3.1.4. Набути навики в експериментальному дослідженні характеристик СТС.
3.2. Ключові положення.
Прийом дискретних сигналів можна здійснити, якщо в приймачі відомо їхнє часове положення. Для завадостійкої реєстрації одиничних елементів сигналу повинні бути точно визначені часові границі тактових інтервалів, що є задачею системи тактової синхронізації (СТС).
При цьому пристрій тактової синхронізації (ПТС) приймача виробляє реєструючі стробуючі імпульси, що повинні збігатися із серединами інформаційних тактових інтервалів.
Розглянутий в роботі ПТС виділяє з дискретних сигналів, що надходять, синхросигнал і “прив'язує” до нього по фазі реєструючі імпульси.
У якості синхросигнала використовуються короткі імпульси, сформовані зі значущих моментів модуляції (3МM) дискретних сигналів, що надходять.
Підстроювання фази тактових імпульсів (ТІ) виконується шляхом зміни частоти задаючого (місцевого) генератора ТІ. У сучасних СТС звичайно використовується непряме керування задаючим генератором (ЗГ), при цьому підстроювання фази виконується в проміжному пристрої.
Розглянемо принцип підстроювання фази в ПТС із непрямим дискретним керуванням рис. 3.2, де як проміжний пристрій застосовується схема додавання і виключення імпульсів (СДВІ). Місцевий задаючий генератор (ЗГ) виробляє імпульси з частотою проходження fзг=mfт яка в m раз більше тактової fт (рис.3.1.1).
Рис.3.1.- Алгоритму додавання та віднімання імпульсів |

Згодом дільник частоти (ДЧ) з коефіцієнтом розподілу Кд=m (у пристрої рис.2 m=8) формує з цих імпульсів послідовність тактових імпульсів з частотою fт (рис.3.1.3). Для зсуву фази тактових імпульсів у високочастотну послідовність може бути доданий (чи виключений з неї) імпульс (рис.3.1.2). Відповідно тактовий імпульс на виході дільника буде зміщатися уліво чи вправо на величину періоду високочастотних імпульсів, Тзг= 1/fзг.

Рис.3.2 Схема тактової синхронізації з непрямим керуванням
|
Розглянемо за допомогою часових діаграм рис.3.3 роботу приведеної на рис. 4.2 структурної схеми ПТС із непрямим керуванням задаючим генератором.
Для утворення синхросигнала з інформаційних сигналів служить формувач імпульсів значущих моментів модуляції (ФІЗММ), що відповідають значущим моментам ЗМ прийнятих дискретних сигналів (формувач імпульсів фронтів ФІФ) двом рівням у граничному пристрої (рис 3.3.1). При цьому спочатку виконується виділення фронтів дискретних сигналів за допомогою диференціюючого ланцюга (ДЛ), а двуполярні імпульси, що при цьому утворяться (рис. 3.3.2) перетворюються в однополярні (рис.3.3.3) випрямлячем В.
У такому виді синхросигнал надходить на фазовий детектор (ФД), туди ж надходить сигнал тактової частоти, який виробляється ПТС. ФД виконує порівняння фаз (часового положення) цих сигналів і при їхній розбіжності формує сигнал помилки на одному з двох своїх виходів у залежності від знака розбіжності фаз ( +, чи - на рис. 3.3.4). При збігу фаз сигнал на виході ФД відсутній. Як видно з рис. 3.2, ФД являє собою дві схеми збігів І1, І2. При випередженні (-3, -4) тактовими імпульсами
Рис.3.2.3 Часові діаграми роботи схеми тактової синхронізації
|

вхідного синхросигнала (права частина тимчасових діаграм рис. 3.3) імпульси останнього проходять через І1 (рис. 3.3.3,5,6), при відставанні (+1, +2) (ліва частина діаграм) -імпульси синхросигнала проходять через І2 (рис.3.3,4,7).
Імпульси помилки з одного з виходів ФД (зі схем І1 і І2) надходять на відповідний вхід реверсивного лічильника (РЛ). Він є інерційним елементом для згладжування впливу на сигнал помилки випадкових флуктуацій фази вхідного синхросигнала під впливом крайових спотворень і інших випадкових факторів, при цьому регулярна складова зрушення фаз у сигналі помилки зберігається. Реверсивний лічильник має ємність S і робить підсумовування імпульсів, посланих на підсумовуючий вхід, і вирахування - по входу, що віднімає. Коли переважає підсумовування і лічильник цілком заповнюється, з'являється сигнал на його правому виході 1, що свідчить про постійне випередження тактовими імпульсами вхідного синхросигнала. Відповідно при відставанні переважає вирахування і лічильник встановлюється у вихідний стан, тоді з'являється імпульс на його лівому виході 2. Тривалість вихідних імпульсів РЛ вибирають приблизно рівною періоду Тзг високочастотних імпульсів ЗГ. Ці імпульси є сигналами керування для схем додавання і виключення імпульсів (СДВІ), що здійснює підстроювання фази тактових імпульсів відповідно до розглянутого вище принципу.
СДВІ складається зі схеми збігів ІЗ і схеми заборони І4, що при подачі па інверсний вхід сигналу логічної "1" не пропускає на вихід імпульси ЗГ, подані на її прямий вхід. Виходи схем ІЗ, І4 об'єднані за допомогою схеми АБО. На перші входи ІЗ, І4 подаються керуючі імпульси з РЛ, на другі - дві послідовності високочастотних імпульсів ЗГ (рис. 3.3,10 у 3.3,11) зміщені, один щодо одного на половину періоду Т/2. При випередженні, коли керуючий сигнал з виходу 2 РЛ з'являється на інверсному виході схеми заборони, з послідовності високочастотних імпульсів ЗГ (рис. 3.3,10) виключається один імпульс(рис. 3.3,12). У результаті цього після дільника частоти на m фаза тактових імпульсів зрушується убік запізнювання на один крок, обумовлений періодом Tзг. Відповідно при відставанні керуючий сигнал з виходу 1 PЛ з'являється на першому виході схеми ІЗ і дозволяє проходження через неї одного додаткового імпульсу з послідовності рис. 3.3,11. У результаті фаза тактових імпульсів зрушується на один крок убік випередження.
У такий спосіб відбувається автоматична корекція фази тактових імпульсів відповідно до регулярної складової синхросигнала.
Описана схема пристрою тактової синхронізації характеризується наступними основними параметрами.
КРОК КОРЕКЦІЇ к - це мінімальний зсув фази ТІ, що відбувається при додаванні (виключенні) одного імпульсу високої частоти (fзг):
к =Тзг.0=fт/fзг
ПОГРІШНІСТЬ ФАЗУВАННЯ -це величина максимального випадкового відхилення фази ТІ, виражається в частках тактового інтервалу. Вона включає дві складові: статичну і динамічну:
=ст+дин
СТАТИЧНА ПОГРІШНІСТЬ ст -відхилення фази ТІ, що
відбувається при прийомі неспотворених дискретних сигналів унаслідок дискретного коректування і нестабільності задаючого генераторів передавача і приймача:
ст =к+г
де г зсув фази ТІ через відносну нестабільність генераторів передавача і приймача за час між сигналами керування. Цей час визначається ємністю S реверсивного лічильника, а нестабільність генераторів - коефіцієнтом нестабільності частоти k=1/m+4k
ДИНАМІЧНА ПОГРІШНІСТЬ дин - відхилення фази ТІ, викликане випадковими крайовими спотвореннями дискретних сигналів (зсувами ЗММ). Це випадкова величина з дисперсією, 2 = 0,628 кр/Sm, де -средньоквадратичне значення крайових спотворень.
ЧАС СИНХРОНІЗАЦІЇ tс- час коректування початкового відхилення фаз ТІ відносно синхросигнала. Це випадкова величина, що визначається випадковим початковим відхиленням фази і частотою проходження сигналів керування, що залежить від характеру синхросигнала (частоти ЗММ і крайових спотворень). При прийомі тексту вважають, що oдин із ЗММ приходиться в середньому на два одиничних елементи. Тоді при відсутності крайових спотворень і максимальному початковому відхиленні 0.50 час синхронізації дорівнює
tс max=Sm0
ЧАС ПІДТРИМКИ СИНФАЗНОСТІ tпс – час, у плині якого відхилення фази ТІ не перевищить припустимого доп при припиненні підстроювання. Причинами припинення підстроювання можуть бути різке погіршення якості каналу і тривала відсутність ЗММ в інформаційному сигналі. Величина доп визначається ефективною здатністю виправляючого приймача еф, тоді
tпс=еф/200КВ