


37
|
0 |
|
|
0 |
|
|
|
|
S = 4S1 = 4 |
⌠ |
′ |
|
⌠ |
3 |
t 3a cos |
2 |
t (−sin t) dt = |
y(t) x (t) dt = 4 |
a sin |
|
|
|||||
|
⌡ |
|
|
⌡ |
|
|
|
|
π 2 |
|
π 2 |
|
|
|
|
||
π 2 |
|
|
|
π 2 |
|
|
|
|
=12a2 ⌠ sin 4 t cos2 t dt =12a2 ⌠ sin 2 t sin 2 t cos2 t dt = |
||||||||
⌡ |
|
|
|
⌡ |
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
=12a
π2
⌠
sin
⌡
0
π 2
⌠
sin
⌡
0
π 2 |
−cos 2t |
|
sin 2 |
2t |
|
2 ⌠1 |
|
dt = |
|||
|
2 |
4 |
|
||
⌡ |
|
|
|
||
0 |
|
|
|
|
|
π 2
2
2 2t dt = 1 ⌠[1−cos 4t]dt 2 ⌡
0
3 |
|
|
|
π 2 |
|
|
|
|
|
π 2 |
|
|
|
|
|
a |
2 |
⌠ |
|
2 |
|
|
|
⌠ |
|
2 |
|
= J . |
|||
2 |
|
|
sin |
|
2t dt − sin |
|
2t cos 2t dt |
||||||||
|
|
|
⌡ |
|
|
|
|
|
⌡ |
|
|
|
|
||
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
1 |
|
sin 4t |
|
π 2 |
|
π |
|
|
|
|
||||
|
|
|
|
|
|
|
|||||||||
= |
2 |
t − |
4 |
|
|
0 |
= |
4 |
. |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||||
|
u = sin t, du = cos 2t 2dt, |
|
1 |
0 |
2 2t cos 2t dt = |
= |
⌠u 2 du = 0 . |
||
|
t = 0 u = 0, t = π 2 u = 0 |
|
2 |
⌡ |
|
|
|
|
0 |
J = |
3 |
a |
2 |
|
π |
= |
3a2π |
(кв.ед.). |
2 |
|
4 |
8 |
|||||
|
|
|
|
|
|
|||
|
|
8.2 |
Вычисление площади в полярных координатах |
|||||
Пусть дан криволинейный сектор OAB , ограниченный радиусамивекторами OA и OB , и кривой, уравнение которой задано в полярных координатах ρ = ρ(ϕ) (рис. 5.9). При
B |
этом предположим, что ρ(ϕ) не- |
|
Ai M |
прерывная на [α; β ] функция. |
|
Пусть радиус-вектор OA об- |
||
i Ai−1 |
||
|
разует с осью l угол α , а радиус- |
|
|
вектор OB – угол β . Разобьем угол |
|
|
~ |
|
A |
OAB на части с помощью лучей, |
|
|
|
|
|
|||
|
β |
ϕi |
|
|
выходящих из полюса O и обра- |
|
O |
α |
|
l |
зующих с полярной осью углы: |
||
|
|
|
||||
|
|
Рис. 5.9 |
|
|
α < ϕ1 < ϕ2 <K< ϕn−1 < β ; |
|
|
|
|
|
обозначим ϕ0 |
=α и ϕn = β . |
|
Обозначим точки пересечения лучей с кривой через A1 , |
A2 , …, An−1 . Криво- |
|||||
линейный сектор OAB разобьется на n малых криволинейных секторов |
||||||
AOA1 , A1OA2 , …, An−1OB . Углы AOA1 , A1OA2 , …, An−1OB соответственно |
||||||
равны |
ϕ1 =ϕ1 −ϕ0 , |
ϕ2 |
= ϕ2 −ϕ1 , …, |
ϕn = ϕn −ϕn−1 . Если обозначить че- |
||
|
38 |
рез S площадь всего криволинейного сектора, а через |
Si – площадь малого |
криволинейного сектора, ограниченного лучами OAi−1 и OAi , то |
|
n |
|
S = ∑ Si . |
(4) |
i=1
Далее поступим следующим~образом.~Внутри каждого малого сектора Ai−1OAi проведем луч под углом ϕi (ϕi−1 < ϕi < ϕi ). Точку пересечения этого
луча с кривой обозначим через M i . Тогда OM i = ρ(ϕ~i ) = ρi . Заменим теперь каждый малый криволинейный сектор Ai−1OAi круговым сектором с центром в точке O радиуса ρi . Площадь каждого такого кругового сектора равна
12 ρi2 ϕi и дает приближенное значение площади соответствующего криво-
линейного сектора. Таким образом, имеем |
Si ≈ |
1 |
ρi2 |
ϕi . Тогда |
|
|
|
2 |
|
|
|
n |
|
|
|
|
|
S ≈ ∑1 ρi2 |
ϕi . |
|
|
|
(5) |
i=1 2 |
|
|
|
|
|
Точность этого приближенного равенства повышается с уменьшением |
ϕi . |
||||
Поэтому точное значение площади S криволинейного сектора получится как предел площади фигуры, составленной из круговых секторов, при условии, что все ϕi → 0 . Таким образом,
|
n |
|
|
|
S = lim |
∑1 |
ρi2 |
ϕi . |
|
ϕi →0 |
i=1 |
2 |
|
|
Т.к. правая часть (5) есть интегральная сумма для непрерывной функции
1 |
ρ2 (ϕ) , то ее предел есть определенный интеграл, т.е. |
|
|||||||
2 |
|
|
|
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S = |
1 |
⌠ |
ρ |
2 |
(ϕ) dϕ . |
(6) |
|
|
|
2 |
|
|
|||||
|
|
|
⌡ |
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
Пример 6. |
|
|
|
|
|
|
|
|
|
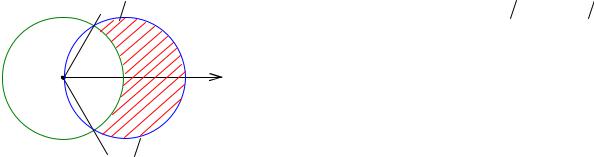
Вычислить площадь фигуры, ограниченной линиями |
ρ = 2 cosϕ , ρ =1 |
|||||||
(вне круга ρ =1). |
|
|
|
|
|
|
|
|
|
Решение. Линия |
ρ = 2 cosϕ представляет собой смещенную окружность |
||||||||
|
π 3 |
|
( ρ ≥ 0 |
cosϕ ≥ 0 −π 2 ≤ ϕ ≤ π 2 ); |
|||||
|
|
|
линия |
|
ρ =1 – окружность радиуса 1 с цен- |
||||
|
|
|
тром в полюсе (рис. 5.10). Найдем точки пе- |
|||||
O |
1 |
2 l |
ресечения линий: |
|
|
|
||
|
|
|
|
ρ = 2 cosϕ, |
|
2 cosϕ =1 ϕ = ± |
π |
. |
|
|
|
|
ρ =1, |
3 |
|||
|
−π |
3 |
|
|
|
|
||
|
|
|
|
|
|
|
||
Рис. 5.10