

Прямая на плоскости, способы задания
Способы графического задания прямой линии |
|
Для определения положения прямой в пространстве существуют следующие методы:
1.Двумя точками (а и в).
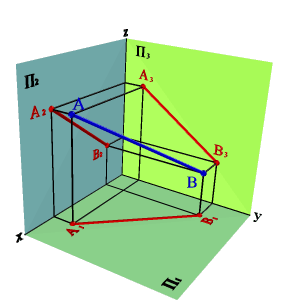
Рассмотрим две точки в пространстве А и В (рис. 15). Через эти точки можно провести прямую линию. Для того чтобы найти проекции отрезка [BA] на плоскости проекций необходимо найти проекции точек А и В и соединить их прямой. Каждая из проекций отрезка на плоскости проекций меньше самого отрезка:
[A1B1]<[BA]; [A2B2]<[BA;] [A3B3]<[BA].
|
б)
эпюр |
Рисунок 15.Определение положения прямой по двум точкам |
|
 а)
модель
а)
модель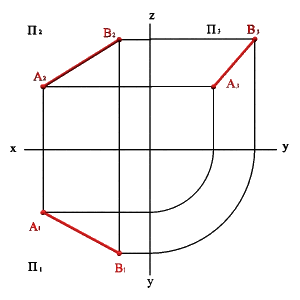
Обозначим углы между прямой и плоскостями проекций через α- с плоскостью П1, β- с плоскостью П2, γ- с плоскостью П3 и тогда получим:
|А1В1|=|BA|cos a
|A2B2|=|AB|cos b
|A3B3|=|AB|cos g.
Частный случай |A1B1|=|A2B2|=|A3B3| при таком соотношении прямая образует с плоскостями проекций равные между собой углы a=b=g=350, при этом каждая из проекций расположена под углом 450 к соответствующим осям проекций.
2. Двумя плоскостями (a; b).
Этот способ задания определяется тем что две непараллельные плоскости пересекаются в пространстве по прямой линии (этот способ подробно рассматривается в курсе элементарной геометрии).
3. Двумя проекциями.
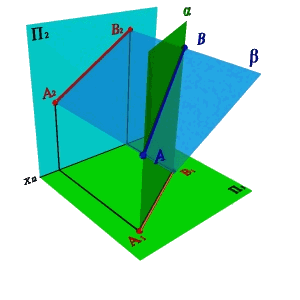
Пусть в плоскостях П1 и П2 даны проекции прямых заданных отрезками [А1В1] и [A2B2]. Проведем через эти прямые плоскости a и b перпендикулярные плоскостям проекций. В том случае если эти плоскости непараллельные (рис.16а), линией их пересечения будет прямая заданная отрезком [АВ], проекциями которой являются отрезки [А1В1] и [А2В2].
|
|
а) a яаньлелларапен b |
б) a и b тюадапвос |
Рисунок 16.Определение положения прямой в пространстве по двум проекциям отрезка |
|
|
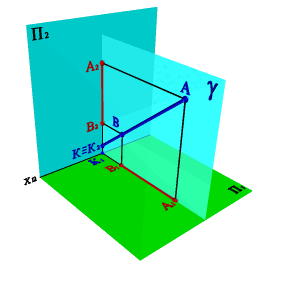
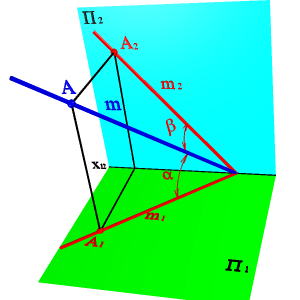
Плоскости a и b могут слиться в одну плоскость g, если, например, проекции [А1В1] и [А2В2] перпендикулярны оси x и пересекают ее в одной точке (рис.16б). Прямая линия в этом случае будет однозначно определена своими проекциями, если на каждой из них обозначить две какие-либо точки. Если же обозначений не делать, то за искомую прямую можно принять любую прямую, лежащую в этой плоскости при условии, что она непараллельная ни одной из плоскостей проекций. Точка К, в данном случае - точка пересечения прямой с плоскостью П2. 4. Точкой и углами наклона к плоскостям проекций. Зная координаты точки принадлежащей прямой и углы наклона ее к плоскостям проекций можно найти положение прямой в пространстве(рис.17). |
|
|
|
|||
|
|||
Рисунок 17. Определение положения прямой по точке и углам наклона к плоскостям проекций |
|
||
положение прямой линии относительно плоскостей проекций |
|
||
Прямая по отношению к плоскостям проекций она может занимать как общее, так и частные положения.
1. Прямая не параллельная ни одной плоскости проекций называется прямой общего положения (рис.18).
|
|
|
|
|
|
|
||
а) модель |
б) эпюр |
|
Рисунок 18. Прямая общего положения |
||

2. Прямые параллельные плоскостям проекций, занимают частное положение в пространстве и называются прямыми уровня. В зависимости от того, какой плоскости проекций параллельна заданная прямая, различают:
2.1. Прямые параллельные горизонтальной плоскости проекций называются горизонтальными или горизонталями (рис.19). Для любой пары точек горизонтали должно быть справедливо равенство
zA=zB Þ A2B2//0x; A3B3//0y Þ xAx–B≠,0 yAy–B≠,0 zAz–B.0=
|
|
|
|
а) модель |
б) эпюр |
||
Рисунок 19. Горизонтальная прямая |
|||


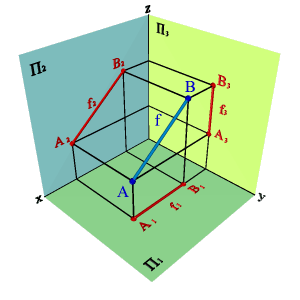
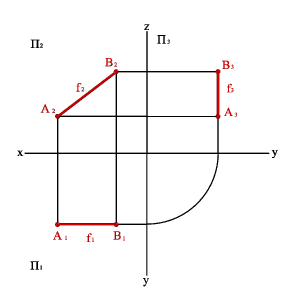
2.2. Прямые параллельные фронтальной плоскости проекций называются фронтальными или фронталями (рис.20).
yA=yBÞ A1B1//,x0 A3B3//z0 Þ xAx–B≠,0 yAy–B,0= zAz–B≠.0
|
|
|
|
а) модель |
б) эпюр |
||
Рисунок 20. Фронтальная прямая |
|||
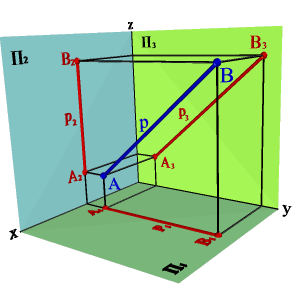
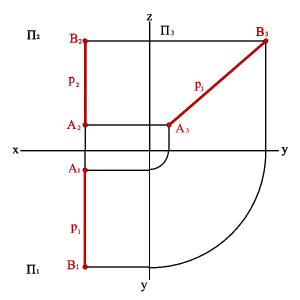
2.3. Прямые параллельные профильной плоскости проекций называются профильными (рис. 21).
xA=xB Þ A1B1//0,y A2B2//z0 Þ xAx–B,0= yAy–B≠,0 zAz–B≠.0
Различают восходящую и нисходящую профильные прямые. Первая по мере удаления от зрителя поднимается, вторая - понижается.
|
|
|
|
а) модель |
б) эпюр |
||
Рисунок 21. Профильная прямая |
|||
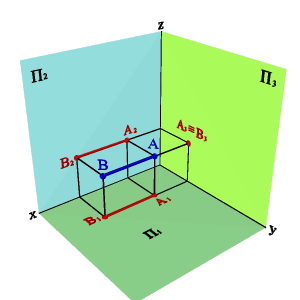
3. Прямые перпендикулярные плоскостям проекций, занимают частное положение в пространстве и называются проецирующими. Прямая перпендикулярная одной плоскости проекций, параллельна двум другим. В зависимости от того, какой плоскости проекций перпендикулярна исследуемая прямая, различают:
3.1. Фронтально проецирующая прямая - АВ .сир( 22)
xAx–B0=ü
yAy–B≠0ý
zAz–B=0þ,
|
|
|
|
а) модель |
б) эпюр |
||
Рисунок 22. Фронтально проецирующая прямая |
|||


3.2. Профильно проецирующая прямая - АВ (рис.23)
xАx–B≠0ü
yАy–B0=ý
zАz–B0=þ,
|
|
|
|
а) модель |
б) эпюр |
||
Рисунок 23. Профильно-проецирующая прямая |
|||

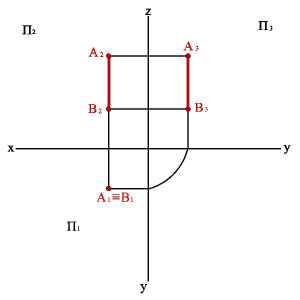
3.3. Горизонтально проецирующая прямая - АВ (рис.24)
xАx–В0=ü
yАy–В0=ý
zАz–В≠0þ.
|
А |
|
|
|
|||
|
|||
а) модель |
б) эпюр |
||
Рисунок 24. Горизонтально-проецирующая прямая |
|||
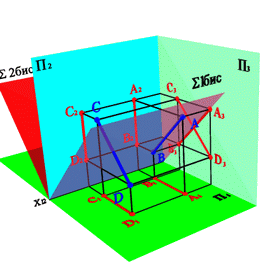
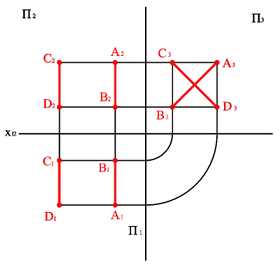
4. Прямые параллельные биссекторным плоскостям (рис. 25)
АВ //S1бис Þ xAx–B0=; zBz–Ay=By–A;
СD//S2бис Þ xСx–D0=; zD–zC=yC–yD.
Биссекторной плоскостью называется плоскость, проходящая через ось 0х и делящая двухгранный угол между плоскостями проекций П1 и П2 пополам. Биссекторная плоскость проходящая через 1 и 3 четверти называется первой биссекторной плоскостью (S1бис), а через 2 и 4 четверти - второй (S2бис).
5. Прямые перпендикулярные биссекторным плоскостям (рис. 25)
АВS^2бис Þ xAx–B0=; zBz–Ay=Вy–А;
СDS^1бис Þ xСx–D0=; zDz–Cy=Cy–D.
|
|
|
|
||
|
|||||
|
|||||
а) модель |
б) эпюр |
|
|||
Рисунок 25. Прямые параллельные и перпендикулярные биссекторным плоскостям |
|
||||
следы прямой линии |
|
||||
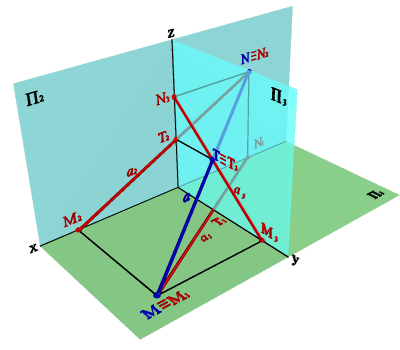
Следом прямой линии называется точка (рис. 26), в которой прямая пересекается с плоскостью проекций (так как след - точка, принадлежащая одной из плоскостей проекций, то одна из её координат должна быть равна нулю).
Горизонтальный след - М (zM)0=-точка пересечения прямой с горизонтальной плоскостью проекций.
Фронтальный след - N y(N)0=- точка пересечения прямой с фронтальной плоскостью проекций.
Профильный след - Т (xТ)0=- точка пересечения прямой с профильной плоскостью проекций.
|
б)
|
Рисунок 26.Следы прямой линии в системе трех плоскостей проекций |
|
 а)
модель
а)
модель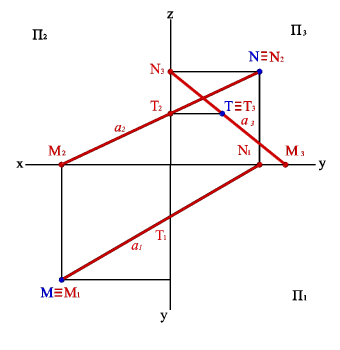 эпюр
эпюрСледы прямой являются точками частного положения. Одноименные проекции следа прямой совпадают с самим следом, а другие проекции лежат на осях. Например, фронтальный след прямой N2ºN, а N1 лежит на оси x, N3 - на оси z. Отмеченные особенности в расположении следов проекций позволяет сформулировать следующие правила:
1. Для построения горизонтального следа М прямой необходимо продолжить ее фронтальную проекцию до пересечения с осью x0 и в этой точке восстановить перпендикуляр к оси до пересечения с горизонтальной проекцией прямой.