

Собственные векторы и собственные значения линейного оператора
Пусть А: Xn → Xn — линейный оператор.
Вещественное число λ называется собственным значением оператора А, если существует ненулевой вектор x О Xn такой, что
А (x) = λ (x). |
Вектор x называется собственным вектором оператора А, соответствующим собственному значению λ .
Замечание. Из определения следует, что образ собственного вектора коллинеарен его прообразу.
Свойства собственных векторов:
Пусть А: Xn → Xn — линейный оператор.
-Все собственные векторы линейного оператора, соответствующие одному и тому же собственному значению, вместе с нулевым вектором образуют линейное пространство.
-Собственные векторы линейного оператора, соответствующие различным собственным значениям, линейно независимы.
-Если линейный оператор А: Xn → Xn имеет n различных (вещественных) собственных значений, то собственные векторы, соответствующие этим собственным значениям, образуют базис в Xn . Такой базис называется собственным базисом линейного оператора А.
-Матрица A линейного оператора А: Xn → Xn в некотором базисе x1, x2, … , xn имеет диагональный вид тогда и только тогда, когда этот базис собственный, причем диагональные элементы этой матрицы — собственные значения оператора λ1, λ2, … , λn .
Нахождение собственных значений и собственных векторов по матрице оператора
Теорема. Вещественное число λ является собственным значением линейного оператора А: Xn → Xn тогда и только тогда, когда λ удовлетворяет уравнению
|
det (A − λE) = 0, |
(1) |
где A — квадратная матрица n –го порядка — матрица оператора А в некотором базисе, а E — единичная матрица того же порядка, что и A .
Доказательство. Пусть вектор x — собственный вектор оператора А, соответствующий собственному значению λ , т.е. по определению
А(x) = λ(x), А(x )= λ Е(x), (А− λ Е) x = θ. |
Следовательно, чтобы найти собственные значения и собственные векторы оператора А, нужно решить однородную систему n линейных уравнений с n неизвестными (A − λE)X = O .
Так как по определению собственного вектора x ≠ θ , то нас интересуют лишь нетривиальные решения этой системы уравнений. Необходимым и достаточным условием нетривиальной совместности однородной системы n уравнений с n неизвестными является условие det (A − λE) = 0 , что и требовалось доказать.
Уравнение (1) называется характеристическим уравнением оператора А.
Т1: Если матрица лин. оператора в некотором базисе имеет диагональный вид, то все векторы этого базиса являются собственными векторами лин. оператора, а числа на главной диагонали являются собственными значениями.
Т2: Если лин. оператор имеет n различных собственных значений, то все его собственные векторы линейно независимы и матрица лин. оператора в этом базисе имеет диагональный вид.
Собственные значения и векторы не зависят от базиса.
Квадратичные формы: определения, свойства, теоремы.
Определение.
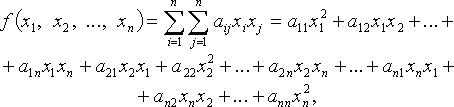
Квадратичной формой
![]() переменных
переменных
![]() ,принимающих
числовые значения , называется числовая
функция вида
,принимающих
числовые значения , называется числовая
функция вида
![]()
![]()
![]() ,
,
где
![]() -
числа, называемые коэффициентами
квадратичной формы.( квадратичная форма
- в n-мерном
пространстве L(x1,x2,…xn)-сумма,
каждое слагаемое которой либо квадрат
одной из переменных, либо произведение
двух различных переменных, взятых с
коэффициентом)
-
числа, называемые коэффициентами
квадратичной формы.( квадратичная форма
- в n-мерном
пространстве L(x1,x2,…xn)-сумма,
каждое слагаемое которой либо квадрат
одной из переменных, либо произведение
двух различных переменных, взятых с
коэффициентом)
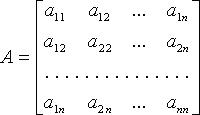
Определение.
Матрицей квадратичной формы
переменных
,
называется симметрическая матрица
порядка
,
элементы главной диагонали которой
совпадают с коэффициентами при квадратах
переменных, а каждый недиагональный
элемент, расположенный в
![]() ой
строке
ой
строке
![]() ом
столбце, равен половине коэфициента
при
ом
столбце, равен половине коэфициента
при
![]() в
квадратичной форме.
в
квадратичной форме.
Определение.
Рангом квадратичной формы называется
ранг её матрицы. Квадратичная форма
может быть записана в матричном виде
![]() где
где
![]() матрица
квадратичной формы и
матрица
квадратичной формы и
![]() .
.
Определение.
Квадратичная форма называется канонической
(имеет канонический вид), если коэфициенты
![]() при
при
![]() ,
то есть, если матрица квадратичной формы
диагональная и следовательно
,
то есть, если матрица квадратичной формы
диагональная и следовательно
![]()
![]() .,
.,
где не все
коэффициенты
![]() равны нулю.
равны нулю.
Теорема (Лагранжа). Для всякой квадратичной формы существует такой базис, в котором квадратичная форма имеет канонический вид.
Определение.
Нормальным видом квадратичной формы
называется такой канонический вид, в
котором коэффициенты при квадратах
неизвестных (не считая нулевых) равны
![]() .
.
Определение.
Квадратичная форма
![]() называется
положительно
называется
положительно
(отрицательно)
определённой, если
![]() при
всех
при
всех
![]() и
положительно (отрицательно)
полуопределённой,если
и
положительно (отрицательно)
полуопределённой,если
![]() при
всех
при
всех
![]() .
.
Теорема (критерий Сильвестра). Для того чтобы квадратичная форма была положительно определённой, необходимо и достаточно чтобы все угловые миноры матрицы квадратичной формы были положительны, то есть, чтобы
![]()
Здесь
![]() -угловые
миноры матрицы квадратичной формы.
-угловые
миноры матрицы квадратичной формы.
Следствие.
Для того чтобы квадратичная форма
была
отрицательно определённой, необходимо
и достаточно, чтобы знаки угловых миноров
матрицы квадратичной формы чередовались
следующим образом:
![]()
Определение квадратичной формы
Квадратичная
форма переменных
![]() -
функция
-
функция
![]() -
коэффициенты квадратичной формы. Без
ограничения общности считают
тогда
-
коэффициенты квадратичной формы. Без
ограничения общности считают
тогда
![]()
Если
переменные
принимают
действительные значения и
![]() квадратичная
форма называется действительной.
квадратичная
форма называется действительной.
Матричная запись квадратичной формы
Матрица
называется
матрицей квадратичной формы, ее ранг -
рангом квадратичной формы. Квадратичная
форма называется невырожденной, если
![]()
Главные миноры матрицы A называются главными минорами квадратичной формы.
В
пространстве
квадратичную
форму можно записать в виде
![]() где
X
- координатный столбец вектора
где
X
- координатный столбец вектора
![]()
В
пространстве
![]() квадаратичную
форму можно представить в виде
квадаратичную
форму можно представить в виде
![]() где
f
- линейный самосопряженный оператор,
матрица которого в некотором
ортонормированном базисе равна A.
где
f
- линейный самосопряженный оператор,
матрица которого в некотором
ортонормированном базисе равна A.
Канонический вид квадратичной формы
Квадратичная
форма называется канонической, если
все
![]() т.
е.
т.
е.
![]()
Всякую квадратичную форму можно привести к каноническому виду с помощью линейных преобразований. На практике обычно применяют следующие способы.
1. Ортогональное преобразование пространства :
![]()
где
![]() -
собственные значения матрицы A.
-
собственные значения матрицы A.
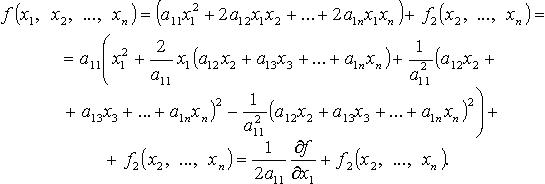
2.
Метод Лагранжа - последовательное
выделение полных квадратов. Например,
если
![]()
Затем
подобную процедуру проделывают с
квадратичной формой
![]() и
т. д. Если в квадратичной форме все
и
т. д. Если в квадратичной форме все
![]() но
есть
но
есть
![]() то
после предварительного преобразования
дело сводится к рассмотренной процедуре.
Так, если, например,
то
после предварительного преобразования
дело сводится к рассмотренной процедуре.
Так, если, например,
![]() то
полагаем
то
полагаем
![]()
![]()
![]()
3.
Метод Якоби (в случае, когда все главные
миноры
![]() квадратичной
формы отличны от нуля):
квадратичной
формы отличны от нуля):
![]()
Нормальный вид квадратичной формы
Для действительной квадратичной формы
![]()
где
![]() r
= rank A.
r
= rank A.
Для комплексной квадратичной формы
![]() r
= rank A.
r
= rank A.
Для действительных квадратичных форм имеет место закон инерции квадратичных форм: число положительных и число отрицательных квадратов в нормальном виде квадратичной формы не зависит от способа приведения квадратичной формы к нормальному виду с помощью невырожденных линейных преобразований.
Классификация действительных квадратичных форм Положительно-определенные
Квадратичные
формы, для которых
![]() таких,
что
таких,
что
![]() Нормальный
вид
Нормальный
вид
![]() Квадратичная
форма является положительно-определенной
тогда и только тогда, когда все ее главные
миноры положительны
Квадратичная
форма является положительно-определенной
тогда и только тогда, когда все ее главные
миноры положительны
![]() (критерий
Сильвестра).
(критерий
Сильвестра).
Отрицательно-определенные
Квадратичные
формы, для которых
![]() таких,
что
Нормальный
вид
таких,
что
Нормальный
вид
![]() Квадратичная
форма является отрицательно-определенной
тогда и только тогда, когда
Квадратичная
форма является отрицательно-определенной
тогда и только тогда, когда
![]()
Положительно-полуопределенные
Квадратичные
формы, для которых
![]() таких,
что
Нормальный
вид
таких,
что
Нормальный
вид
![]() r
< n,
r
= rank A.
r
< n,
r
= rank A.
Отрицательно-полуопределенные
Квадратичные
формы, для которых
![]() таких,
что
Нормальный
вид
таких,
что
Нормальный
вид
![]() r
< n,
r
= rank A.
r
< n,
r
= rank A.
Неопределенные
Квадратичные
формы, которые принимают как положительные,
так и отрицательные значения. Нормальный
вид:
![]() r
= rank A.
r
= rank A.