

29. Нелинейное программирование
Задача оптимизации в общем виде:
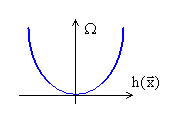
Минимизировать функцию:
![]()
При ограничениях:
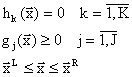
На вид функции ограничений не накладывается.
Можно выделить следующие типы методов решения задач нелинейного программирования:
1) Методы, основанные на прееобразовании задачи. Задача с ограничениями преобразуется в последовательность задач безусловной оптимизации.
2) Методы линеаризации. Нелинейные функции в постановке линеаризуются, то есть разлагаются в ряд Тейлора и оставляются только линейные члены, после чего решается последовательность задач линейного программирования.
3) Методы квадратичной аппроксимации. Аналогично, но в ряду Тейлора оставляются квадратичные члены. Получается последовательность задач квадратичного программирования.
4) Методы выбора напралений - модифицированные методы направлений безусловной оптимизации.
5) Методы прямого поиска. Дополнение изученных методов проверками на попадание в условия.
Методы преобразования задач
Пусть
![]() является
решением задачи оптимизации в общем
виде. Возьмём некоторое начальное
приближение
является
решением задачи оптимизации в общем
виде. Возьмём некоторое начальное
приближение
![]() ,
возможно недопустимое (не удовлетворяющее
ограничениям), тогда пространстве RN
строится последовательность векторов
,
возможно недопустимое (не удовлетворяющее
ограничениям), тогда пространстве RN
строится последовательность векторов
![]() .
Последовательность заканчивается
.
Последовательность заканчивается
![]() ,
которое даёт некоторое приближение к
решению. В качестве
на
каждой итерации берутся стационарные
точки так называемой штрафной функции
(ШФ). Она является вспомогательной
задачей условной оптимизации. С помощью
ШФ исходная задача сводится к
последовательности задач безусловной
оптимизации.
,
которое даёт некоторое приближение к
решению. В качестве
на
каждой итерации берутся стационарные
точки так называемой штрафной функции
(ШФ). Она является вспомогательной
задачей условной оптимизации. С помощью
ШФ исходная задача сводится к
последовательности задач безусловной
оптимизации.
ШФ - это функция вида:
![]()
W - штраф, R - штрафной параметр.
R меняется на каждой итерации и фактически используется набор штрафных параметров R(t). W имеет различный вид для равенств и неравенств. При построении W должны выполняться следующие условия:
1) Решения подзадач безусловной оптимизации должны стремиться к решению исходной задачи, то есть:
![]()
2)
Сложность задачи оптимизации функции
![]() должна
быть хотя бы того же порядка, что и для
функции
должна
быть хотя бы того же порядка, что и для
функции
![]() .
.
3) Правило пересчёта штрафного параметра на каждой итерации должно быть достаточно простым.
Основные типы штрафов
Штрафы, учитывающие ограничения-равенства.
Для учёта ограничений равенств всегда используется квадратичный штраф.
![]()
|
Этот
штраф препятсятвует отклонению
![]() от
0 как в положительную, так и в отрицательную
стороны.
от
0 как в положительную, так и в отрицательную
стороны.
При этом R начинается с 0 или наибольшего положительного числа и возрастает от итерации к итерации.
Если есть несколько ограничений равенств, то:
![]()
Штрафы, учитывающие ограничения-неравенства.
1) Бесконечный барьер.
|

Этот штраф принимает бесконечно большое значение в недопустимых точках и 0 в допустимых.
![]()
2) Логарифмический штраф.
![]()
R начинается с большого положительного числа и стремится к нулю.
|

Штраф
положителен на всех
![]() на
[0,1] и отрицптелен для
>
1.
на
[0,1] и отрицптелен для
>
1.
3) Штраф, задаваемый обратной функцией.
![]()
R начинается с большого положительного числа и стремится к нулю.
|

В недопустимых точках штраф имеет отрицательное значение, а в допустимых - положительное.
4) Штраф типа квадрата срезки.

![]()
|

R начинается с 0 и растёт от итерации к итерации. В допустимых точках штраф равен нулю.