

11. Классификация связей в динамике. Аналитическое задание связей. Идеальные связи.
Связи – любого вида ограничения, которые налагаются на положения и скорости точек механической системы, выполняются независимо от того, какие на систему действуют заданные силы. Классификация связей:
Не изменяющиеся со временем – стационарные, изменяющиеся нестационарные
Налагающие ограничения на положения (координаты) точек системы, геометрические, налагающие ограничения еще и на скорости – кинематические или дифференциальные
Если дифференциальные связи можно представить как геометрические, то такие связи называются интегрируемые, а в противном случае неинтегрируемые.
Геометрические и интегрируемые дифференциальные связи называют также голономными, неинтегрируемые дифференциальные связи – неголономными. По виду связи механические системы тоже также разделяют.
Удерживающие – налагаемые ими ограничения сохраняются при любом положении системы; неудерживающие – система может «освобождаться».
Идеальными называются связи, для которых сумма элементарных работ их реакций на любом возможном участке равна нулю.
Аналитическое задание связей -- ???
12. Принцип возможных перемещений. Возможные и действительные перемещения.
Возможные перемещения - любая совокупность элементарных перемещений точек этой системы из занимаемого в данный момент времени положения, которые допускаются всеми наложенными на систему связями.
Различают действительные и возможные перемещения. (действительные – система совершает, возможные – не совершает).
Число независимых между собой возможных перемещений механической системы называются числом степеней свободы этой системы.
Возможные перемещения точек системы должны удовлетворять двум условиям:
1) они должны быть бесконечно малыми, так как при конечных перемещениях система перейдет в другое положение, где условия равновесия могут быть другими;
2) они должны быть такими, чтобы при этом все наложенные на систему связи сохранялись, так как иначе мы изменим, вид рассматриваемой механической системы (система станет другой).
При́нцип возмо́жных перемеще́ний — один из вариационных принципов механики, устанавливающий общее условие равновесия механической системы. Согласно этому принципу для равновесия механической системы с идеальными связями необходимо и достаточно, чтобы сумма работ dAi, всех приложенных к системе активных сил на любом возможном перемещении системы была равна нулю.
Количество уравнений, которые можно составить для механической системы, исходя из принципа возможных перемещений, равно количеству степеней свободы этой самой механической системы.
Пусть
материальная система находится в
равновесии. Силы, действующие на каждую
ее точку, уравновешиваются. Если
![]() – равнодействующая всех активных сил,
приложенных к i-той точке, а
– равнодействующая всех активных сил,
приложенных к i-той точке, а
![]() – реакция связей этой точки, то (рис.65)
– реакция связей этой точки, то (рис.65)
![]()
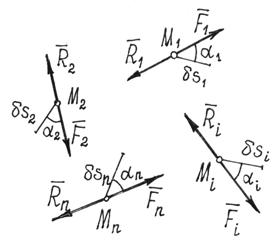
Рис.65
Дадим
системе какое-нибудь возможное
перемещение. Все точки ее получат
перемещения
![]() ,
,
![]() ,
,
![]() ,…,
,…,
![]() .
.
Затем вычислим работу всех сил на этих перемещениях.
Так
как силы, приложенные к каждой точке
уравновешиваются и
![]() ,
то сумма работ этих сил на перемещении
,
то сумма работ этих сил на перемещении
![]() будет равна нулю:
будет равна нулю:
![]()
![]() .
Значит и сумма работ всех сил, приложенных
ко всем точкам, будет равна нулю
.
Значит и сумма работ всех сил, приложенных
ко всем точкам, будет равна нулю
![]() .
.
Если связи идеальные, то вторая сумма всегда равна нулю. Значит,
![]() (1)
(1)
Этот результат, уравнение работ, называют общим уравнением статики.
При равновесии материальной системы с идеальными и стационарными связями сумма работ всех активных, задаваемых, сил на любом возможном перемещении системы из положения равновесия равна нулю.
По принципу Даламбера материальную систему, движущуюся под действием некоторых сил, можно рассматривать находящейся в равновесии, если ко всем точкам системы приложить их силы инерции. Значит можно воспользоваться и принципом возможных перемещений.
В уравнение работ (1) добавится еще сумма работ сил инерции точек на их возможных перемещениях:
![]() (2)
(2)
Эти уравнения называют общим уравнением динамики. Оно позволяет решать большой класс задач на исследование движения довольно сложных материальных систем.
Уравнение показывает, что в любой фиксированный момент времени сумма элементарных работ активных сил и сил инерции на любых виртуальных перемещениях равна нулю при условии, что на систему наложены идеальные и удерживающие связи.