

6.3. Помехоустойчивый прием модулированных колебаний при импульсной огибающей
При изложении методов помехоустойчивого приема будем использовать модели передатчиков импульсно-модулированных колебаний, приведенные в разделе 3.1.1. Поскольку в качестве базовых изложены три модели, АМ, ЧМ и ФМ, то соответственно будем рассматривать три вида приемников.
6.3.1 Некогерентный ам-прием
Приемник АМ-колебаний с импульсной огибающей является простейшим из трех видов модуляции и входит в группу некогерентных, т. е. не нуждающихся в опорной частоте. Структурная схема такого приемника приведена на рис. 6.14.
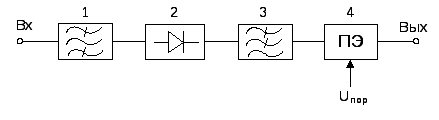
Рис. 6.14. Структура некогерентного АМ-приемника
Здесь блоки выполняют следующие функции: 1 – полосовой фильтр; 2 – детектор; 3 – фильтр нижних частот; 4 – пороговый элемент (UПОР – уровень срабатывания).
На рис.6.15 приведены временные диаграммы по каждому из блоков приемника.
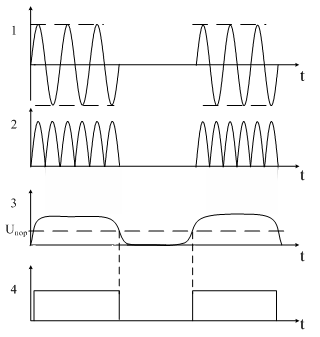
Рис. 6.15. Временные диаграммы АМ-приемника
Узкополосный фильтр 1 предназначен для ограничения спектра принимаемых сообщений. Если помеха является белым шумом, полосовой фильтр заметно снижает ее мощность. Для выделения информационной составляющей, т. е. огибающей производится детектирование. Возможно одно- и двухполупериодное выпрямление; на диаграмме позиция 2, приведен6 двуполупериодный вариант. На следующем этапе, после низкочастотной фильтрации, выделяется постоянная составляющая, как это показано на рисунке 6.15, позиция 3. На окончательной стадии восстановленный сигнал превращается в строго прямоугольный с помощью ПЭ.
Большое
значение имеет выбор
![]() .
При этом возможны варианты приема,
показанные на рис. 6.16.
.
При этом возможны варианты приема,
показанные на рис. 6.16.
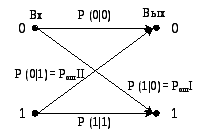
Рис. 6.16. Диаграмма переходов для бинарных сообщений
Здесь приведен ориентированный граф, который назван диаграммой переходов и обозначающий следующее. Вершины слева соответствуют передаче соответственно 0 или 1. Независимо (пока) от вероятностей этих событий, рассмотрим возможные переходы. Справа показаны вершины, соответствующие восстановленным после приема бинарным сигналам. Даже в простейшем варианте бинарного приема возможны четыре различные ситуации:
1.
Переданный 0 восстанавливается в 0 с
условной вероятностью
![]() (здесь и далее справа – символ передачи,
слева – символ восстановления).
(здесь и далее справа – символ передачи,
слева – символ восстановления).
2.
Переданная 1 восстанавливается в 1 с
условной вероятностью
![]() .
.
3.
Переданный 0 в приемнике ошибочно
восстанавливается в 1 с вероятностью
![]() .
.
4.
Переданная 1 в приемнике ошибочно
восстанавливается в 0 с вероятностью
![]() .
.
Первые
два варианта соответствуют правильному
приему; вариант 3 называется ошибкой I
рода и имеет вероятность
![]() I;
вариант 4 аналогично называется ошибкой
II рода с вероятностью
I;
вариант 4 аналогично называется ошибкой
II рода с вероятностью
![]() .
Если считать, что эти события независимы,
то каждая из пар образует полную группу
событий, что дает следующее соотношение:
.
Если считать, что эти события независимы,
то каждая из пар образует полную группу
событий, что дает следующее соотношение:
|
|
|
(6.14) |
В
зависимости от уровня
![]() вероятности ошибок первого и второго
рода имеют вид, представленный на
рис.6.17. Действительно, при малом значении
порогового уровня влияние помехи во
время передачи 0 достаточно велико. По
мере повышения
вероятности ошибок первого и второго
рода имеют вид, представленный на
рис.6.17. Действительно, при малом значении
порогового уровня влияние помехи во
время передачи 0 достаточно велико. По
мере повышения
![]() вероятность снижается, тогда как
вероятность противоположной ошибки
возрастает. Тогда оптимальным можно
считать такое значение
вероятность снижается, тогда как
вероятность противоположной ошибки
возрастает. Тогда оптимальным можно
считать такое значение
![]() ,
при котором ошибки I и II
рода равновероятны. Если канал симметричен,
т. е. воздействие аддитивной помехи
одинаково и для 0, и для 1, а значение
оптимального порога лежит посредине,
т. е.
,
при котором ошибки I и II
рода равновероятны. Если канал симметричен,
т. е. воздействие аддитивной помехи
одинаково и для 0, и для 1, а значение
оптимального порога лежит посредине,
т. е.
![]() .
.

Рис. 6.17. Зависимости ошибок от уровня порога
На этот уровень обычно и настраивается АМ-приемник. При несимметричном канале необходима коррекция. Кроме того, появляются дополнительные ошибки при изменении амплитуды сигнала (мультипликативные помехи). Бороться с ними достаточно трудно, поэтому данный метод приема считается неперспективным.