

6.2. Простейшие методы приема импульсных сигналов
В теории информации и связи возможны два вида несущих, классические прямоугольные импульсы и импульсы произвольной формы. Обе последовательности могут быть регулярными и псевдослучайными. Будем рассматривать вначале последовательность прямоугольных импульсов, причем со скважностью 2, что обеспечивает узкий спектр.
При прохождении прямоугольных импульсов через физические линии связи они изменяют свою амплитуду под действием двух факторов: свойств линий связи и внешних помех.
Известно, что физические линии связи представляют собой так называемые длинные линии: последовательно включенные трех- и четырехполюсники. Схемы таких линий приведены на рис. 3.8 а) и б).
|
а) |
б) |
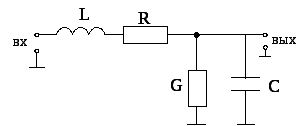

Рис. 6.8. Эквивалентные схемы замещения участка длинной линии: несимметричные и симметричные варианты
Они в таком виде приводятся для проводных линий связи, но эквивалентные схемы возможны и для других типов линий. Здесь схема а) соответствует несимметричной линии, когда сигналы передаются по одному проводу, а для замыкания цепи используется земля. Вследствие несимметричности такие линии обладают низкой помехоустойчивостью и высоким затуханием. Элементы и их размерности имеют следующий физический смысл: L – удельная индуктивность (Гн/км); R – удельное сопротивление (Ом/км); G – удельная проводимость изоляции (См/км); C – удельная емкость провода относительно земли с учетом изоляции (мкФ/км).
Для второй схемы первые два параметра имеют то же значение, но G и C – это соответственно проводимость и емкость меду двумя проводами. Так как пары проводов обычно скручивают (так называемые бифилярные пары), емкость в них значительно меньше, чем в предыдущем варианте.
Приведенные параметры обычно увязывают в единый, так называемое волновое сопротивление:
|
|
|
(6.4) |
Это функция от частоты, которая определяет затухание сигнала по амплитуде и его сдвиг по фазе.
После
прохождения по линии связи прямоугольный
сигнал принимает форму, приведенную на
рис.6.9. Из него видно, что сигнал становится
непрямоугольным, передний и задний
фронты растягиваются, что называется
задержками
![]() и
и
![]() .
Кроме того, присутствует и общая задержка,
зависящая от длины линии связи (на
рисунке не показана). Все три типа
задержки носят в значительной степени
случайный характер.
.
Кроме того, присутствует и общая задержка,
зависящая от длины линии связи (на
рисунке не показана). Все три типа
задержки носят в значительной степени
случайный характер.

Рис. 6.9. Искажения импульса на выходе линии связи
В данном примере рассматриваем только детерминированные искажения. Случайные помехи чаще всего рассматриваются как естественные и принимаются как белый или подкрашенный шум. Кроме того, наиболее часто используют аддитивную модель помехи, накладывающуюся на сигналы сложением:
|
|
|
(6.5) |
Здесь
![]() – константа,
– константа,
![]() ,
,![]() и
и
![]() –
это соответственно сигнал, помеха и
результат. Мультипликативная помеха
определяется методом умножения:
–
это соответственно сигнал, помеха и
результат. Мультипликативная помеха
определяется методом умножения:
|
|
|
(6.6) |
Пример мультипликативной помехи – случайные изменения параметров четырехполюсника.
Анализ помехоустойчивости обычно проводят для аддитивных помех вследствие их большего уровня. Кроме того, они низкочастотные и могут снижаться другими способами. В дальнейшем остановимся на подавлении аддитивных помех. Для этого рассмотрим вначале три основных приема подавления импульсных помех.
1. Стробирование. Метод основан на том, что наименьшее влияние оказывается на средине импульса (см. рис. 6.9). Схема приемника, основанного на стробировании приведена на рис. 6.10.
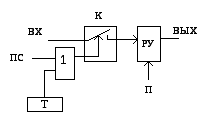
Рис. 6.10. Метод приема со стробированием
Здесь обозначено: ПС – пилот - сигналы (внешние сигналы синхронизации); Т – таймер; РУ – решающее устройство; П – порог; К – ключ. Синхроимпульсы настроены на средину каждого импульса и «вырезают» таким образом, наименее уязвимую его часть. Решающее устройство в простейшем случае сравнивает выход ключа с пороговым значением П: если выходное напряжение ключа превышает порог, на выходе – 1, если нет – 0.
Метод стробирования широко используется на практике вследствие достаточно высокой простоты и эффективности. Его главный недостаток – зависимость результата от уровня входного сигнала. Если амплитуда на входе «гуляет», это неизбежно отразится на выходном сигнале. Тем не менее, этот метод широко используется, особенно при выравнивании амплитуд на входе.
2. Интегральный прием. Особенно эффективен для помех типа «белый шум», когда отдельные выбросы в ту или иную другую область просто сглаживаются. Основной алгоритм приема записывается в форме:
|
|
|
(6.7) |
где
М – константа,
![]() – длительность импульса. Если условие
выполняется, сигнал принимается равным
1, если нет – 0. В отличие от предыдущего
случая, здесь используется так называемый
метод приема, сущность которого лучше
проиллюстрировать по схеме приемника,
приведенной на рис. 6.11.
– длительность импульса. Если условие
выполняется, сигнал принимается равным
1, если нет – 0. В отличие от предыдущего
случая, здесь используется так называемый
метод приема, сущность которого лучше
проиллюстрировать по схеме приемника,
приведенной на рис. 6.11.

Рис. 6.11. Интегральный дифференциальный приемник
Здесь
пронумерованные элементы означают
следующее: 1 – аналоговый инвертор
(элемент, изменяющий полярность сигнала
на противоположную); 2 и 3 – интеграторы;
4 – таймер; 5 – схема вычитания; 6 –
нуль-орган (элемент с релейной
характеристикой, вырабатывающей на
выходе 1 при положительном входном
воздействии и 0 – при отрицательном).
Время интегрирования равно
![]() .
В результате, если на входах интеграторов
2 и 3 одно напряжение больше другого,
результат будет однозначным независимо
от уровня входного сигнала приемника.
В этом и состоит сущность дифференциального
приема.
.
В результате, если на входах интеграторов
2 и 3 одно напряжение больше другого,
результат будет однозначным независимо
от уровня входного сигнала приемника.
В этом и состоит сущность дифференциального
приема.
Заметим, что здесь, как и в предыдущем случае, очень важна синхронизация таймера относительно передатчика; в противном случае резко возрастает вероятность ошибок.
3. Корреляционный прием фактически является усовершенствованием интегрального. В приемник дополнительно вводится весовая функция с запаздыванием на величину S. Алгоритм приема имеет вид:
|
|
|
(6.8) |
Здесь
![]() -
величина, которую можно использовать
как по виду (собственно функции), так и
по задержке
-
величина, которую можно использовать
как по виду (собственно функции), так и
по задержке
![]() .
Обычно корреляционный прием используется
как аддитивный, т. е. приспосабливаемый
к условиям меняющейся ситуации в канале
связи. При этом обычно вид функции
.
Обычно корреляционный прием используется
как аддитивный, т. е. приспосабливаемый
к условиям меняющейся ситуации в канале
связи. При этом обычно вид функции
![]() описывает физические свойства линии
связи, а
описывает физические свойства линии
связи, а
![]() – временные задержки.
– временные задержки.
Другие приемы помехоустойчивого приема, являющиеся сейчас классическими, являются расширениями рассмотренных выше методов. Они основаны на модели идеального сигнала и сравнении с ним принятых сообщений. Рассмотрим два способа: идеальный помехоустойчивый прием Котельникова и согласованную фильтрацию.
Идеальный приемник Котельникова основан на сравнении принимаемого сигнала с идеальным, причем в его основе лежит метод наименьших квадратов. Алгоритм основан на интегральных оценках вида:
|
|
(6.9) |
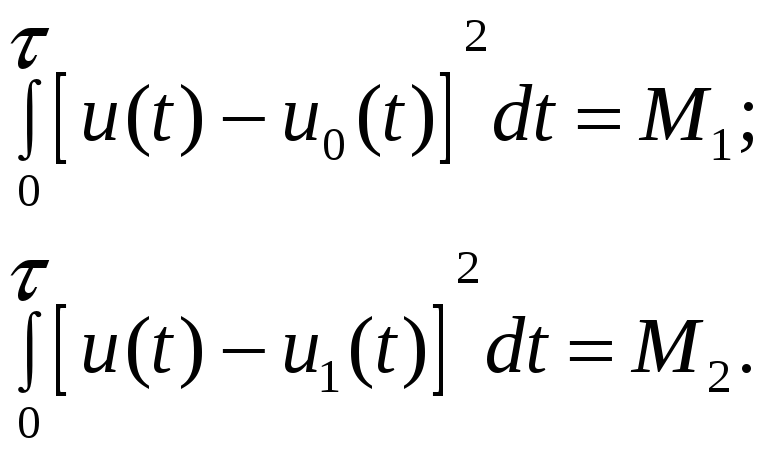
Второй
этап – выбор некоторой константы
![]() ,
с которой сравниваются полученные
оценки. При этом возможны четыре случая:
,
с которой сравниваются полученные
оценки. При этом возможны четыре случая:
|
1) |
|
2) |
|
3) |
|
4) |
|
(6.10) |
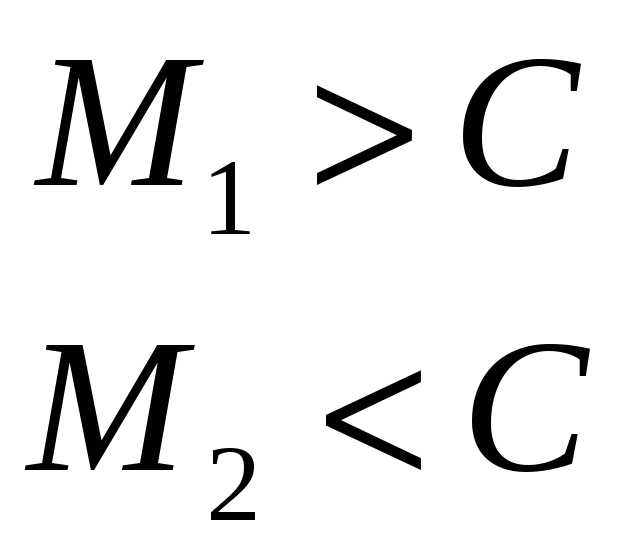


Рассмотрим более детально эти варианты решений. Вариант 1) означает, что принятое колебание более близко к 1 (так как разность меньше), следовательно, сигнал идентифицируется как 1. вариант 2) по той же логике идентифицируется как прием 0. Что касается двух оставшихся вариантов, то по ним нельзя принимать решения: они относятся к области неопределенности. Такие колебания обычно стираются. Это относится к классу методов приема со стиранием. Выбирается зона неопределенности, в которой не принимаются решения, и результат отклоняется. В дальнейшем возможны различные варианты восстановления: или запрашивается повторная передача, или используются специальные приемы восстановления. К последним относится, в частности, теория нечетких множеств. Ее рассмотрение выходит за рамки данного пособия.
Недостатком метода Котельникова является нелинейная функция под интегралом. Несмотря на, казалось бы, линеаризацию после интегрирования, алгоритм очень чувствителен к выбросам, т. е. резким отклонениям амплитуды. Нами это было проверено при моделировании: при увеличении уровня помех стабильность результата, т. е. вероятность ошибки возрастает.
Автором была предложена модифицированная модель алгоритма Котельникова, когда сравниваются результаты оценок (6.9) между собой. Эту процедуру можно описать формулой:
|
|
(6.11) |
Здесь,
как и прежде,
![]() – длительность принимаемого сигнала
(импульса). В предложенном методе
исключается одна константа
– длительность принимаемого сигнала
(импульса). В предложенном методе
исключается одна константа
![]() ,
которую можно назвать степенью свободы,
но решение становится более жестким.
Правило решения достаточно простое:
если левая часть больше правой, принята
1, если нет – 0. Сюда же можно ввести и
неопределенность, как и в предыдущем
случае и вносить элементы, попавшие в
эту зону, в область стирания.
,
которую можно назвать степенью свободы,
но решение становится более жестким.
Правило решения достаточно простое:
если левая часть больше правой, принята
1, если нет – 0. Сюда же можно ввести и
неопределенность, как и в предыдущем
случае и вносить элементы, попавшие в
эту зону, в область стирания.
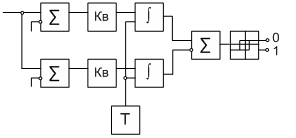
Рис. 6.12. Приемник Котельникова
Выражение (6.11) может быть представлено в виде структурной схемы, показанной на рисунке 6.12. Здесь, кроме ранее приводимых элементов, дополнительно введены квадраторы (обозначены Кв), а решающее устройство представлено как релейный элемент с зоной нечувствительности.
Согласованная
фильтрация основана на знании формы
принимаемых сигналов. Согласованные
фильтры (СФ) оптимизируют отношение
сигнал/шум при заданной форме сигнала
и помехе типа «белый шум». Так как белый
шум задается единственным параметром,
мощностью (или дисперсией![]() ),
то выражение для расчета СФ принимает
вид:
),
то выражение для расчета СФ принимает
вид:
|
|
(6.12) |

где
![]() – дополнительно вводимый параметр, по
которому настраивается фильтр. Выражение
(6.12) означает, что по этому параметру
вычисляется частная производная, которая
при приравнивании к нулю определяет
максимум отношения сигнал/шум.
– дополнительно вводимый параметр, по
которому настраивается фильтр. Выражение
(6.12) означает, что по этому параметру
вычисляется частная производная, которая
при приравнивании к нулю определяет
максимум отношения сигнал/шум.
Заметим,
что выражение имеет смысл только при
заданной форме сигнала. Оно имеет
интересное решение: оказывается,
согласованный фильтр должен иметь
частотную характеристику
![]() ,
повторяющую спектр входного колебания
,
повторяющую спектр входного колебания
![]() :
:
|
|
|
(6.13) |
В
частности, фильтр, согласованные на
прямоугольные импульсы, должен иметь
частотную характеристику, приведенную
на рис.6.13. В аналоговой технике такая
форма частотной характеристики
принципиально невозможна, так как
нарушается основное правило Хемминга:
![]() .
В точках, где
.
В точках, где
![]() ,
это условие не выполняется. При
использовании цифровых фильтров,
описанных выше, это возможно с достаточной
степенью точности.
,
это условие не выполняется. При
использовании цифровых фильтров,
описанных выше, это возможно с достаточной
степенью точности.
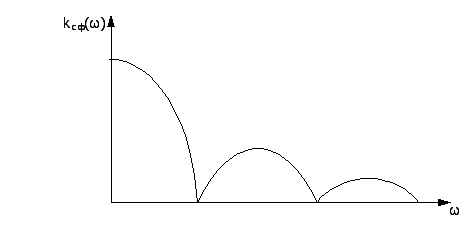 Рис.
6.13. Частотная характеристика фильтра,
согласованного на прием прямоугольных
импульсов
Рис.
6.13. Частотная характеристика фильтра,
согласованного на прием прямоугольных
импульсов