

6.2. Методы импульсной модуляции гармонической несущей
Это наиболее классическая группа методов, включающая упомянутые выше приемы. В такой постановке задачи разработаны две группы методов: некогерентный и когерентный помехоустойчивый прием. Слово «когерентный» обозначает привязку к частоте передаваемых сообщений, как по несущей частоте, так и по частоте огибающей.
Рассмотрим вначале некогерентный прием с учетом чисто физических методов. Он основан на построении модели помехи и включает в себя как минимум три составляющих:
– помехи, связанные со свойствами каналов связи;
– помехи, не зависящие от источника сообщений;
– помехи от соседних каналов (интерканальные).
Рассмотрим вначале общие структуры приемопередающих систем, входящие в общий курс основ систем связи и радиопередающих систем. Основные элементы таких структур принято обозначать графическими обозначениями, представленными ниже.
В общем виде различают фильтры низких частот, верхних частот и полосовой фильтр. Изображение включает перечеркнутые части частотных областей, не пропускаемые фильтром.
Возможны четыре типа частотнозависимых фильтров:
–
нижних частот:
![]()
–
верхних частот:
![]()
–
узкополосные
![]()
–
режекторные:
![]()
Если необходимо
подчеркнуть, что фильтр имеет жесткие
требования по полосе пропускания, то в
пиктограмме используется изображение
с двойной перечеркнутой синусоидой.
Так, например, очень узкополосный фильтр
будет иметь изображение вида:
![]()
Вторая
группа технических средств – модуляторы:
устройства, переносящие сигнал на
несущую частоту. Модулятор обозначается
в виде:
![]()
В
предложенном изображении обозначено:
![]() – опорный сигнал, относительно которого
производится преобразование. В дальнейшем
будут рассмотрены, по крайней мере,
четыре вида демодуляторов: амплитудный,
фазовый, частотный и комбинированный.
– опорный сигнал, относительно которого
производится преобразование. В дальнейшем
будут рассмотрены, по крайней мере,
четыре вида демодуляторов: амплитудный,
фазовый, частотный и комбинированный.
Остановимся на этом методе более подробно. Нас более всего «волнует» вторая часть: организация передачи/приема импульсных колебаний, где под импульсами понимается двоичный код типа «0» или «1».
При передаче двоичных колебаний возможны следующие первичные структуры: амплитудная, частотная или фазовая модуляция. Первый вариант, амплитудная модуляция при бинарной огибающей имеет структуру и вид сигнала, приведенные на рис. 6.2.

а) б) в)
Рис. 6.2. Амплитудно-модулированные колебания при импульсной огибающей
На рисунке 6.2 а) показана общая структура устройства, рисунок 6.2 б) иллюстрирует общий вид выходного колебания, а 6.2 в) – вид спектральной диаграммы.
На рисунке 6.3 приведена аппаратная реализация предложенного устройства. Именно в таком виде были реализованы первые приемопередающие устройства Маркони и Попова. До сих пор существует полемика о том, кто первым передал радиосообщение, но в данном случае нас должен волновать единственный предмет: элемент цивилизации, эквивалентный изобретению колеса.
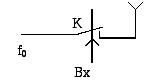
Рис. 6.3. Аппаратная реализация метода АМ
Если огибающая, т. е. закон управления несущей частотой, имеет более сложную форму, это отражается на спектре огибающей. При огибающей типа последовательности прямоугольных импульсов со скважностью 2 (когда длительность импульса равна длительности паузы и общий период равен сумме длительностей импульса и паузы), спектр результирующего колебания имеет вид, представленный на рисунке 6.2 в).
В
настоящее время это основной способ
описания амплитудно-модулированной
модуляции. На рисунке 6.2 в) показано, что
для однозначного воспроизведения
(приема/передачи) достаточно первых
трех гармоник импульсной огибающей (т.
е. первой, третьей и пятой гармоник). В
результате получается спектр с полосой
занимаемых частот
![]() ,
где
,
где
![]() соответствует основной частоте
соответствует основной частоте
![]() .
.
Аппаратная реализация метода передачи тривиальна. Для обеспечения метода достаточно коммутировать генератор несущей частоты.
Главное в аппарате и вытекающих из него следствиях заключается в том, что закон управления (огибающая) определяет ширину спектра (т. е. полосу занимаемых частот), а несущая частота задает правило приема.
На
входе приемника может быть произвольное
колебание, вписывающееся в правило
теоремы Парсеваля. В частности, для
рассматриваемого нами примера, когда
огибающая представляет собой прямоугольные
импульсы со скважностью 2, достаточно
трех значащих гармоник, первой, третьей
и пятой. Тогда полоса занимаемых частот
![]() будет соответствовать удвоенной полосе
частот огибающей, т. е.
будет соответствовать удвоенной полосе
частот огибающей, т. е.
![]() .
.
При модуляции типа АМ–ЧМ структура передатчика принимает вид, приведенный на рис. 6.4.

а) б) в)
Рис. 6.4. Частотно-модулированные колебания
Здесь
имеется две несущие,
![]() и
и
![]() ,
соответственно представляющих две
несущих частоты. При передаче двоичных
сигналов в линию связи передается или
одна, или вторая несущая. Аппаратно это
имеет вид, представленный на рис. 6.5.
Здесь в качестве источников опорных
частот используются два опорных
генератора, вырабатывающие частоты
соответственно
,
соответственно представляющих две
несущих частоты. При передаче двоичных
сигналов в линию связи передается или
одна, или вторая несущая. Аппаратно это
имеет вид, представленный на рис. 6.5.
Здесь в качестве источников опорных
частот используются два опорных
генератора, вырабатывающие частоты
соответственно
![]() и
и
![]() .
.
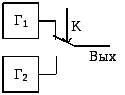
Рис. 6.5. Аппаратная реализация метода ЧМ при импульсной огибающей
Исходя
из предыдущего метода, полоса частот
при передаче каждого из уровней, 0 или
1, равна
![]() .
С учетом полосы запаса
.
С учетом полосы запаса
![]() общая полоса частот
общая полоса частот
![]() составит три частотных диапазона,
передачу кода «0», передачу кода «1» и
полосу запаса:
составит три частотных диапазона,
передачу кода «0», передачу кода «1» и
полосу запаса:
|
|
(6.3) |
В
классической теории передачи сигналов
принято считать, что полоса запаса равна
полосе сигнала:
![]() .
Тогда общий частотный диапазон
.
Тогда общий частотный диапазон
![]() .
Другими словами, при таком способе
передачи частотный диапазон утраивается.
.
Другими словами, при таком способе
передачи частотный диапазон утраивается.
Фазовая модуляция при дискретной огибающей принимает довольно элегантный вид. Достаточно сказать, что первые модемы аналогового типа строились именно по этой методике. Структура модулятора, временная диаграмма на его выходе и получаемый при этом спектр представлены на рисунке 6.6. Здесь на фрагменте а) приведена структура модулятора, на фрагменте б) – временная диаграмма его работы, на фрагменте в) – спектральная диаграмма. В виде треугольника изображен инвертор, который обеспечивает поворот фазы несущей синусоиды. В результате совокупности таких преобразований образуются колебания, представленные на рисунке 6.6 б), при которых образуются повороты фазы на 180°. Это дает спектральную диаграмму, представленную на рисунке 6.6 в). Сравнение спектральных диаграмм, приведенных на рисунке 6.2 в) и 6.6 в) дает основание для того, чтобы сделать вывод: полоса занимаемых частот одинакова. Зато помехоустойчивость двух этих методов несоизмерима в пользу метода ФМ.

а) б) в)
Рис. 6.6. Фазо-модулированные колебания
В данном случае это – классика, предполагающая то, что все колебания, и входные, и опорные, представляют собой непрерывные функции. Фактически все процессы представляют собой цифровые последовательности, а дополнительные процедуры – их арифметические/алгебраические преобразования. Действительно, если входной сигнал оцифрован, то, что собой представляет опорное колебание? Цифру. Что такое взаимодействие входного сигнала с опорным? Умножение цифр. Что собой представляет результат? Суммирование умножений, в конце которого получается одна цифра.
В рассматриваемом нами варианте предполагается, что и входной сигнал, и несущие колебания непрерывны, т. е. удовлетворяют условиям Дирихле. Фактически дело обстоит намного серьезнее, но это уже выходит за рамки математики. В качестве примера приведем классическую на сегодня схему реализации описанных выше устройств, приведенную на рис. 6.7.
Здесь обозначено, кроме приведенных выше аббревиатур: Пр –процессор (устройство или алгоритм), ГОЧ – генератор опорных частот, Упр – управление генератором.
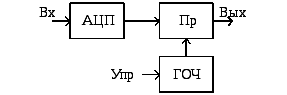
Рис. 6.7. Реализация структуры обобщенного цифрового преобразования
На основе модели передачи по рис. 6.7 можно реализовать любую из предложенных выше структур. Если предположить, что ГОЧ представляет собой ПЗУ с записанными в нем цифровыми значениями синусоиды, то в данном варианте можно реализовать множество структур обработки колебаний, которые не предвиделись или считались невозможными в аналоговом режиме. Действительно, как можно реализовать частотно-зависимый фильтр порядка выше четвертого, если заранее известно, что он неустойчив? Как можно реализовать произвольную частотную характеристику при отсутствии физических возможностей ее реализации? В цифровой форме эти проблемы решаются, но при ряде дополнительных ограничений. Знать эти ограничения и уметь профессионально их использовать – удел высшего профессионализма.