

Литература
1. Попов Е.П. Теория линейных систем автоматического регулирования и управления. – М.: Наука, 1989. – 304 с.
2. Егоров К.В. Основы теории автоматического регулирования. – М.: Энергия, 1967. – 648 с.
3. Востриков А.С., Французова Г.А. Теория автоматического регулирования. – М.: Высшая школа, 2004. – 365 с.
4.Бесекерский В.А., Попов Е.П. Теория автоматического регулирования. – М.: Наука, 1974 – 992с.
Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем. – М.: Машиностроение, 1973. – 606 с.
Фельдбаум А.А., Бутковский А.Г. Методы теории автоматического управления. – М.: Наука, 1971. – 744 с.
Теория автоматического управления. Часть 1./ Под ред. А.В. Нетушила. – М.: Высшая школа, 1968. – 424 с.
Помимо требования быть устойчивой, к системе автоматического регулирования предъявляется требование по качеству регулирования. Необходимо, чтобы САР удовлетворяла ряду требований, связанных с переходным режимом и установившимся режимом.
Качество переходного процесса определяется совокупностью показателей, характеризующих приближение реального процесса к желаемому. О показателях судят, измеряя ряд величин в переходном процессе при единичном ступенчатом воздействии.
Показатели качества в переходном режиме подразделяют на прямые и косвенные. Прямые получают непосредственно по переходной функции. Косвенные рассчитывают.
6.1. Прямые показатели качества
Основной характеристикой качества САР является точность, которая оценивается ошибкой регулирования
![]() .
(6.1)
.
(6.1)
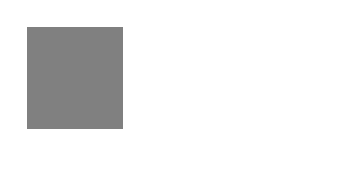
Пример появления ошибки регулирования в системе автоматической стабилизации показан схемой на рис. 6.1. Система должна обеспечивать равенство управляемой величины y(t) задающему воздействиюu(t) при действии возмущения z(t) . Регулятор обозначен передаточной функциейW1(p) , объект управления – передаточной функциейW2(p) .
 z(t)
z(t)


 u(t) (t)
x(t) y(t)
u(t) (t)
x(t) y(t)




 W1
W2
W1
W2


Рис. 6.1. Замкнутая система
автоматического регулирования.
Нетрудно убедиться, что ошибка регулирования зависит от задающего воздействия и от возмущения. Для этого, методом обратного движения построим операторное уравнение
![]() .
.
Запишем уравнение по Лапласу ошибки
E(p) = U(p) – Y(p) ,
учтем формулу передаточной функции по ошибке
![]()
и после простых алгебраических действий получим:
![]() .
.
Первое слагаемое делает вклад в ошибку регулирования от задающего воздействия, второе – от возмущения. Передаточные функции представляют свойства системы.
Введем в формулу (6.1) условие единичного ступенчатого воздействия, u(t) = 1(t) . Тогда переходной функцией будет h(t) . Ошибка получает вид
![]() .
(6.2)
.
(6.2)
Формула (6.2) показывает, что ошибка отличается от переходной функции на постоянную величину. Поэтому, оценивая качество, в формулах можно использовать непосредственно переходную функцию. При импульсном воздействии ошибка регулирования будет отличаться от таковой при единичном ступенчатом воздействии.
С течением времени h(t) стремится к установившемуся значению h(∞) , а ошибка регулирования – к некоторому постоянному значению
![]() .
.
Это значение ошибки называют статической ошибкой. Статическая ошибка есть рассогласование между установившемся значением регулируемой величины и ее заданным значением:
![]() .
.
Смысл статической ошибки заключается в следующем. Система исполняет регулирующую команду не до конца: когда достигается установившееся состояние, остается некоторое остаточное отклонение регулируемого параметра от заданного значения. Остаточное отклонение зависит от конструктивных особенностей САР и от величины управляющего воздействия.
Разность
![]() (6.3)
(6.3)
называют динамической ошибкой.
Систему автоматического регулирования с остаточной ошибкой в установившемся режиме называют статической системой.
Наряду со статическими, есть системы, у которых регулируемый параметр по достижении равновесия принимает точно заданное значение. Систему автоматического регулирования, которая исполняет регулирующую команду точно, называют астатической.
Подводя итог сказанному, можно констатировать:
показатель качества «точность» оценивается двумя ошибками: статической и динамической;
регулирование статической системы происходит с ошибкой.
- астатическая система регулируется без ошибки.
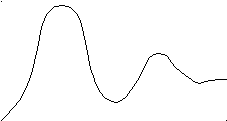
Быстродействие. Оценивается временем регулирования tp, рис. 6.2. Это промежуток времени, по истечении которого отклонение выходной величины от установившегося значения h() не превышает некоторой заранее заданной величины Δ . Последняя носит название «поры нечувствительности».Обычно назначают Δ в пределах (0,01 … 0,05) h(∞) .
h (t)
(t)

 hmax
hmax
 2
Δ
2
Δ



 h(∞)
h(∞)



0 tн tм tp
Рис. 6.2. Переходная функция
Наряду с tp для колебательных процессов используют две другие оценки быстродействия. Одна из них – время tн от начала процесса до первого пересечения кривой h (t) с прямой h = у() , рис. 6.2. Время tн называют временем нарастания переходного процесса. Другая – время tм достижения первого максимума, рис. 6.2.
Перерегулирование. Это максимальное отклонение регулируемой величины от установившегося значения h(). Определяется в процентах:
![]() (6.4)
(6.4)
hmax – величина h(t) в момент времени tм, рис. 6.2.
Чем больше , тем более система склонна к колебаниям.
Число колебаний регулируемой параметра h(t) за время регулирования tp. Период колебаний определяется как 2/ . Частное от деления времени регулирования на период колебаний есть число колебаний
![]() .
(6.4)
.
(6.4)
Число колебаний регулируемой величины оценивает показатель переходного процесса, называемый «колебательность». Высокая колебательность отвечает большой амплитуде или частоте колебаний, медленному затуханию. В этом случае величина ν тоже большая. Низкой колебательности отвечает малая величина ν .
Специфические особенности системы регулирования могут потребовать дополнительные оценки качества. Например, точность воспроизведения входного сигнала, величина ошибки от возмущения и др.