

§1.15. Реактивное движение. Уравнение Мещерского.
Реактивное движение
основано на законе сохранения импульса.
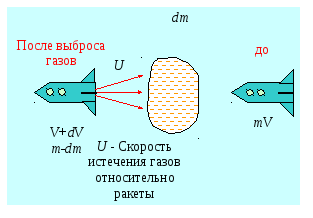
ракета газы до



![]() [(m
- dm)(
[(m
- dm)(![]() + d
+ d![]() )
+ dm(
)
+ dm(![]() +
+
![]() )]
-
)]
-
![]() ,
где
,
где
![]() -
скорость истечения газов относительно
ракеты. Тогда
-
скорость истечения газов относительно
ракеты. Тогда
![]() +
+![]() (здесь опущены величины порядка
(здесь опущены величины порядка
![]() )
)
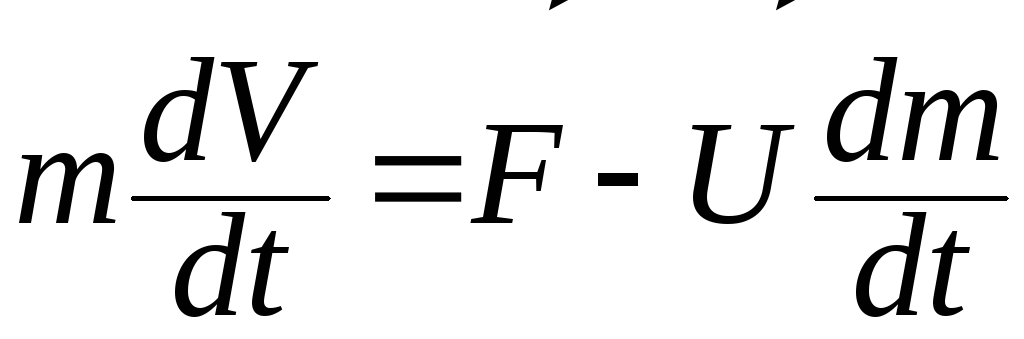
Если на ракету
действуют внешние силы, то
![]() ,
поэтому
,
поэтому
![]() +
+![]() или
или
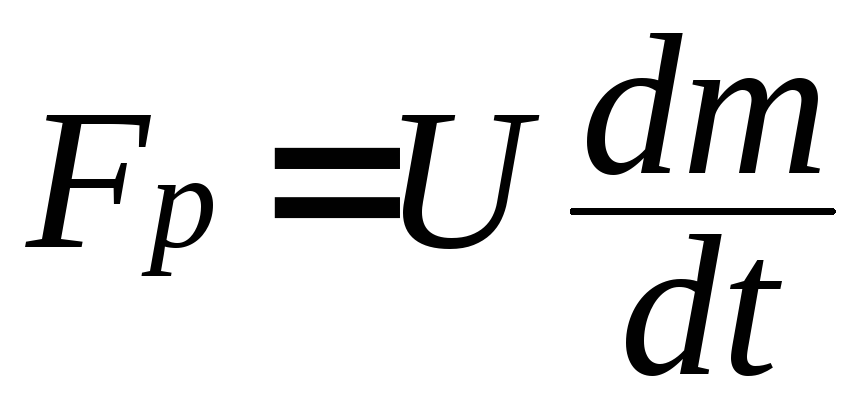 - реактивная сила
- реактивная сила
Если
![]() противоположно
противоположно
![]() по
направлению, то ракета ускоряется, а
если совпадает с
по
направлению, то ракета ускоряется, а
если совпадает с
![]() ,
то тормозится. Окончательно уравнение
движения тела переменной массы
,
то тормозится. Окончательно уравнение
движения тела переменной массы
![]() +
+![]() -
уравнение Мещерского
-
уравнение Мещерского
Если внешних сил нет (F = 0), то

Значение постоянной интегрирования С определим из начальных условий. Если при t = 0 m = m0 и V = 0, то С = U∙lnm0. Следовательно,
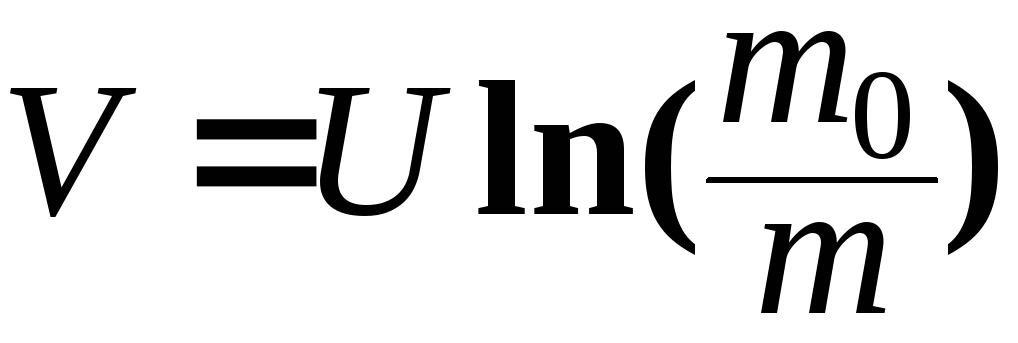 -
формула Циолковского
-
формула Циолковского
Она показывает, что:
1) чем больше конечная масса ракеты m, тем больше должна быть стартовая масса ракеты,
2) чем больше скорость истечения U газов, тем больше может быть конечная масса при данной стартовой массе ракеты.
Пример 1
Частица движется вдоль оси х по закону x = αt2 – βt3, где α и β –положительные постоянные. В момент t = 0 сила, действующая на частицу, равна F0. Найти значения силы Fx в точках поворота и в момент, когда частица опять окажется в точке х = 0.
Решение
 ,
откуда
,
откуда
![]() ,
при t
= 0 , будет
,
при t
= 0 , будет
![]() ,
откуда
,
откуда
 .
Время поворота найдём из условия, что
в точке поворота
.
Время поворота найдём из условия, что
в точке поворота
![]() ,
поэтому
,
поэтому
 - время поворота. Ускорение в этот момент
времени будет
- время поворота. Ускорение в этот момент
времени будет
![]() ,
откуда сила, действующая в этот момент
времени будет
,
откуда сила, действующая в этот момент
времени будет
 -
сила, действующая в точке поворота.
Когда тело возвращается в исходную
точку (х =
0), имеем:
-
сила, действующая в точке поворота.
Когда тело возвращается в исходную
точку (х =
0), имеем:
αt2
– βt3
= 0 →
![]() .
В этот момент времени
.
В этот момент времени

сила, действующая в этот момент времени
Итак, сила,
действующая в точке поворота
![]() ,
сила, действующая в точке х
= 0
,
сила, действующая в точке х
= 0
![]()
Пример 2
Катер массы m
движется по озеру со скоростью
![]() .
В момент времени t
= 0 выключили
двигатель. Считая силу сопротивления
пропорциональной скорости катера,
.
В момент времени t
= 0 выключили
двигатель. Считая силу сопротивления
пропорциональной скорости катера,
![]() ,
найти:
,
найти:
а)время движения катера с выключенным двигателем;
б)скорость катера в зависимости от пути, пройденного с выключенным двигателем, а также полный путь до остановки.
Решение
По II
закону Ньютона
![]() ,
или
,
или
 .
.
Разделяя переменные, получаем




§1.16. Преобразование скорости и ускорения
при переходе от одной системы отсчёта к другой
В рамках ньютоновской механики длина и время считается абсолютными. Любой масштаб одинаков в разных системах отсчета, т.е. не зависит от движения. Течение времени также одинаково во всех системах.
Имеются две
произвольные системы отсчета
![]() и
и
![]() ,
движущиеся относительно друг друга.
Известны скорость V
и ускорение а некоторой точки
,
движущиеся относительно друг друга.
Известны скорость V
и ускорение а некоторой точки
![]() в К и
в К и
![]() ′-
системе. Каковы соответствующие значения
V′
и
′-
системе. Каковы соответствующие значения
V′
и
![]() этой
точки в
этой
точки в
![]() -системе?
-системе?
Рассмотрим три наиболее важных случая движения одной системы отсчета относительно другой.
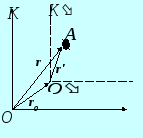
1.К'-система движется поступательно по отношению к К-системе.
Пусть в К-системе
начало отсчета К'-системы
задаётся радиусом-вектром
![]() а её скорость и ускорение – векторами
V0
и
а её скорость и ускорение – векторами
V0
и
![]() Если положение точки А
в К-системе
определяется радиусом-вектором
Если положение точки А
в К-системе
определяется радиусом-вектором
![]() то
то
![]()
За промежуток
времени
![]() точка
точка
![]() совершит в К-системе
перемещение
совершит в К-системе
перемещение
![]()
![]()
Откуда для преобразования скорости будет:
V = V0 + V
Дифференцируя по времени, получаем:
![]()
При
![]()
![]() т.е. при движении К'-
системы без ускорения относительно
К-системы,
ускорения точки в обеих системах отсчета
будут одинаковы.
т.е. при движении К'-
системы без ускорения относительно
К-системы,
ускорения точки в обеих системах отсчета
будут одинаковы.
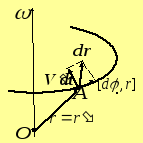
2.К'-система
вращается с постоянной угловой скоростью
![]() вокруг оси, неподвижной в К-системе.
вокруг оси, неподвижной в К-системе.
Возьмем начала отсчета К- и К'-систем в произвольной точке О на оси вращения
Тогда радиус-вектор точки А в обеих системах отсчета будет один и тот же:
![]()
Если точка А
неподвижна в К'-системе,
то её перемещение
![]() в К-системе за время
в К-системе за время
![]() обусловлено
только поворотом радиуса-вектора
обусловлено
только поворотом радиуса-вектора
![]() на
угол
на
угол
![]() (вместе с К'-системой)
и равно векторному произведению
(вместе с К'-системой)
и равно векторному произведению
![]()
Если же точка А
движется относительно К'-системы
со скоростью
![]() то за время
то за время
![]() она
совершит дополнительно перемещение
она
совершит дополнительно перемещение
![]() (рис.)
и тогда
(рис.)
и тогда
![]()
Разделив это
выражение на
![]() получим формулу преобразования скорости:
получим формулу преобразования скорости:
![]() ,
,
где V и V′ скорости точки А в К- и К'-системах отсчета соответственно.
В соответствии с
(1) приращение
![]() вектора
вектора
![]() за время
за время
![]() в
К-системе
должно складываться из суммы приращений
векторов
в
К-системе
должно складываться из суммы приращений
векторов
![]() и
и
![]() т.е.
т.е.
![]()
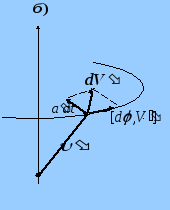
Если точка А
движется в К'-системе
с
![]() то
приращение этого вектора в К-системе
обусловлено только его поворотом на
угол
то
приращение этого вектора в К-системе
обусловлено только его поворотом на
угол
![]() (вместе с К'-системой)
и равно, как и в случае с
(вместе с К'-системой)
и равно, как и в случае с
![]() векторному произведению
векторному произведению
![]() Если же точка А
имеет ускорение
Если же точка А
имеет ускорение
![]() в
К'-системе,
то за время
в
К'-системе,
то за время
![]() вектор
вектор
![]() получит еще дополнительное приращение
получит еще дополнительное приращение
![]() и тогда
и тогда
![]()
Подставив всё в предыдущее равенство получаем формулу преобразования ускорения:
![]()
где
![]() и
и
![]() ускорения
точки А
в К-
и К'-
системах отсчета. Второе слагаемое в
правой части этой формулы называют
кориолисовым (или поворотным) ускорением
ускорения
точки А
в К-
и К'-
системах отсчета. Второе слагаемое в
правой части этой формулы называют
кориолисовым (или поворотным) ускорением
![]() третье
слагаемое – осестремительным ускорением
третье
слагаемое – осестремительным ускорением
![]()
![]()
![]()
Таким образом, ускорение относительно К-системы равно сумме трех ускорений:
-
ускорения
 относительно
относительно
 -системы;
-системы;
-
кориолисова ускорения
 ;
;
-
осестремительного ускорения
Осестремительное
ускорение можно представить в виде
![]() где
где
![]() радиус-вектор,
перпендикулярной оси вращения и
характеризующей положение точки А
относительно этой оси. Тогда формулу
можно переписать так:
радиус-вектор,
перпендикулярной оси вращения и
характеризующей положение точки А
относительно этой оси. Тогда формулу
можно переписать так:
![]()
3.К'-
система вращается с постоянной угловой
скоростью
![]() вокруг оси, перемещающейся поступательно
со скоростью
вокруг оси, перемещающейся поступательно
со скоростью
![]() и ускорением
и ускорением
![]() по отношению к К-системе.
по отношению к К-системе.
Этот случай
объединяет два предыдущих. Введем
вспомогательную S-систему
отсчета, которая жестко связана с осью
вращения К'-системы
и перемещается поступательно в К-системе.
Пусть V
и VS
скорости точки А
в К
и
![]() -
системах отсчета, тогда
-
системах отсчета, тогда
![]()
заменив VS
выражением
![]() где
где
![]() радиус-вектор
точки А относительно произвольной точки
на оси вращения
радиус-вектор
точки А относительно произвольной точки
на оси вращения
![]() -системы,
получим следующую формулу преобразования
скорости:
-системы,
получим следующую формулу преобразования
скорости:
![]()
Аналогичным образом, найдем формулу преобразования ускорения:
![]()
В последних двух
формулах V,
V′
и
![]()
![]() скорости
и ускорения точки А
соответственно в
скорости
и ускорения точки А
соответственно в
![]() -
и
-
и
![]() -системах
отсчета, V0
и
-системах
отсчета, V0
и
![]() скорость
и ускорение оси вращения К'-системы
в К-системе,
скорость
и ускорение оси вращения К'-системы
в К-системе,
![]() радиус-вектор
точки А
относительно произвольной точки на оси
вращения и характеризующий положение
точки А
относительно этой оси.
радиус-вектор
точки А
относительно произвольной точки на оси
вращения и характеризующий положение
точки А
относительно этой оси.
Пример.
Диск вращается с
постоянной угловой скоростью
![]() вокруг
собственной
оси, укрепленной на оси. По диску движется
точка А
с постоянной относительно стола скоростью
V
Найдем скорость V′
и ускорение
вокруг
собственной
оси, укрепленной на оси. По диску движется
точка А
с постоянной относительно стола скоростью
V
Найдем скорость V′
и ускорение
![]() точки
А относительно диска в момент, когда
радиус-вектор, характеризующей ее
положение по отношению к оси вращения,
равен
точки
А относительно диска в момент, когда
радиус-вектор, характеризующей ее
положение по отношению к оси вращения,
равен
![]() Скорость V′
точки А
Скорость V′
точки А
![]()
Ускорение же
![]() найдем,
учтя, что в данном случае
найдем,
учтя, что в данном случае
![]() ибо
ибо
![]() Тогда
Тогда
![]() После подстановки в эту формулу для
После подстановки в эту формулу для
![]() получим
получим
![]()