

§1.4. Пространство и время.
Материя, из которой состоят все тела, существует в пространстве и во времени.
Тело или система тел, относительно которых определяется положение остальных тел, называется пространственной системой отсчета.
Под временем в количественном смысле этого слова понимается показание каких-то часов.
§1.5. Кинематическое описание движения.
Степени свободы.
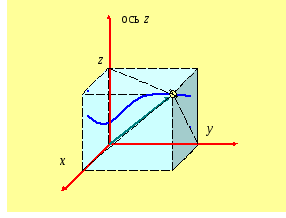
Положение точки
в пространстве, как видно из рисунка,
определяется тремя координатами x,
y,
z.
Во всех случаях при различном выборе
систем отсчета радиус-вектор
![]() и
положение точки в пространстве
характеризуются тремя числами, которые
могут меняться независимо друг от друга.
Это является математическим выражением
того факта, что пространство трехмерно.
Поскольку три величины, характеризующие
положение точки в пространстве, взаимно
независимы, говорят, что материальная
точка обладает тремя степенями свободы.
и
положение точки в пространстве
характеризуются тремя числами, которые
могут меняться независимо друг от друга.
Это является математическим выражением
того факта, что пространство трехмерно.
Поскольку три величины, характеризующие
положение точки в пространстве, взаимно
независимы, говорят, что материальная
точка обладает тремя степенями свободы.
Число независимых координат, описывающих положение тела (или системы тел) в пространстве, называется числом степеней свободы.
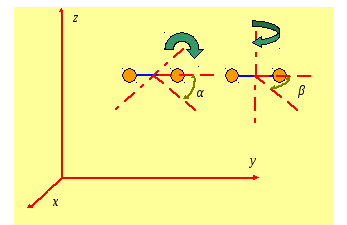
В общем случае степеней свободы может быть больше. Так, например, для задания положения в пространстве линейной молекулы (например, двухатомной) этих трёх поступательных степеней свободы недостаточно. Находясь в одной точке пространства, молекула может быть ориентирована различным образом. Поэтому помимо трёх поступательных степеней свободы (x, y, z) необходимы ещё две вращательные степени свободы (углы α и β).
Координатная система отсчета может быть различной. Декартова система координат.

Орты осей координат
![]() ,
,![]() ,
,![]() -
образуют правую систему. Положение
точки в пространстве задается ее
радиусом-вектором
-
образуют правую систему. Положение
точки в пространстве задается ее
радиусом-вектором
![]() (х,
у, z)
или в векторной форме
(х,
у, z)
или в векторной форме
![]() + у∙
+ у∙![]() +
z∙
+
z∙![]()
При движении материальной точки её координаты изменяются со временем. В общем случае её движение описывается скалярными уравнениями:
x = x(t), y = y(t), z = z(t)
Они эквивалентны векторному уравнению
![]() =
=
![]() (t)
(t)
![]() =
x(t)∙
=
x(t)∙![]() +y(t)∙
+y(t)∙![]() +z(t)∙
+z(t)∙![]()
Это - кинематические уравнения движения материальной точки. Исключив из них время, получим уравнение траектории движения материальной точки.
Траектория – линия, описываемая точкой в пространстве во время движения. В зависимости от формы траектории движение может быть прямолинейным или криволинейным. При прямолинейном движении траектория – прямая линия.
Всякое движение твердого тела можно разложить на два основных вида движения – поступательное и вращательное.
Поступательное движение – это движение, при котором любая линия, связанная с движущимся телом, остается параллельной самой себе.
При вращательном движении все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой – оси вращения.
§1.6. Вектор перемещения. Скорость. Ускорение.

![]()
∆![]() -
вектор перемещения.
-
вектор перемещения.
Вектор средней
скорости
![]()
Направление вектора
средней скорости совпадает с направлением
вектора ∆![]() .
.
Мгновенная скорость
![]()
Из рисунка видно,
что при ∆t
![]() 0
, будет ∆S
0
, будет ∆S![]() ∆r
∆r
Откуда
 ds
= Vdt
или d
ds
= Vdt
или d![]() =
=
![]() dt
dt
S
=
![]()
В случае равномерного движения числовое значение мгновенной скорости постоянно.
![]() +Vy
+Vy![]() +Vz
+Vz![]()
![]() x
x![]() +
y
+
y![]() +z
+z
![]()
Vx=![]()
Vy=![]()
![]()
Vz
=![]()
Модуль
![]() можно
определить так: V=
можно
определить так: V=![]()
Вектор величины
мгновенной скорости направлен по
касательной и траектории. В случае
неравномерного движения скорость
![]() может
изменяться со временем как по модулю,
так и по направлению. Быстрота изменения
вектора
может
изменяться со временем как по модулю,
так и по направлению. Быстрота изменения
вектора
![]() определяется
ускорением
определяется
ускорением
среднее и мгновенное ускорение
![]()

![]()
ax=![]()
ay=
az=![]()
a
=![]()
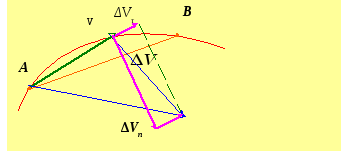
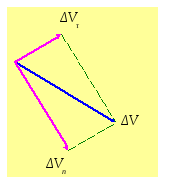
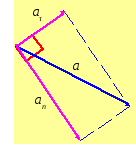
Разложение вектора
∆![]() на
две составляющие ∆Vn
и ∆Vτ
– нормальную и тангенциальную.
на
две составляющие ∆Vn
и ∆Vτ
– нормальную и тангенциальную.
∆Vτ – определяет изменение скорости за время ∆t по модулю.
∆Vn – определяет изменение скорости за время ∆t по направлению.
Тангенциальная составляющая ускорения.
![]() =
=
![]() ,
т.е. равна первой производной по времени
от модуля скорости, определяя, тем самым,
быстроту изменения скорости по модулю.
,
т.е. равна первой производной по времени
от модуля скорости, определяя, тем самым,
быстроту изменения скорости по модулю.
![]()
Нормальная составляющая ускорения.
B
ΔVτ
Д
![]()



![]()
![]() V
V
ΔS
A

Δφ
Δr
∆Vn
![]()


Е
Δφ
r r
О
Можно показать,
что
![]() - нормальное или центростремительное
ускорение, определяет быстроту изменения
скорости по направлению.
- нормальное или центростремительное
ускорение, определяет быстроту изменения
скорости по направлению.
Полное ускорение
![]() +
+![]()
Модуль полного
ускорения
![]()
Если t1 = 0, at1 =V0, то обозначив t2 = t и V2 =V, получим
 +
+![]()
Откуда S
=
S
= V0t
+
![]() - для прямолинейного равноускоренного
движения.
- для прямолинейного равноускоренного
движения.
Для такого движения
х = х0
+ S
= x0
+V0t
+
![]()
x
= x0
+V0t
+
![]()