

Амплитудная модуляция
При амплитудной модуляций изменяется амплитуда высокочастотного несущего колебания (1.1) пропорционально u(t).
С учетом (1.2), вынося U0 зa скобки, выражение (1.1) можно представить в следующем виде:
 (1.5)
(1.5)
Выражение (1.5) описывает амплитудно-модулированный (AM) сигнал. Если до модуляции амплитуда колебаний (1.1) была постоянна, то теперь она будет изменяться по закону низкочастотного первичного сигнала u(t). Поэтому сигнал u(t) называют модулирующей функцией. Она может быть непрерывной или дискретной. Для непрерывного сообщения функции u(t), f(t) и uАМ приведены на рис. 1.12, а.
Для дискретного сообщения, если оно закодировано двоичным кодом, модулирующая функция u(t) будет принимать только два значения: 1 или 0. В этом случае амплитудную модуляцию называй амплитудной манипуля-цией (рис. 1.12, б).
Модуляция осуществляется в устройстве, называемом амплитудным модулятором. При подаче на один его вход напряжения несущей частоты, а на другой вход - низкочастотного первичного сигнала u(t), на выходе модулятора образуется амплитудно-модулированный или амплитудно-манипулированный сигнал.
Амплитудно-манипулированные сигналы чаще всего применяются в каналах слухового телеграфирования. Поэтому амплитудную манипуляцию называют амплитудным телеграфированием (AT). Режим AT относится к видам работы с пассивной паузой и обладает низкой помехоустойчивостью. В связи с этим его не применяют в каналах приема на автоматическую регистрирующую аппаратуру. В то же время режим AT весьма эффективен в слуховых каналах приема, использующих код Морзе. В силу физиологических особенностей слухового аппарата человека прием телеграфных сигналов оператором возможен даже в тех случаях, когда уровень сигнала соизмерим с уровнем помех или даже ниже его. Поэтому режим AT применяется в самых современных системах связи.
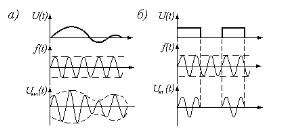
рис.1.12
Перейдем
к рассмотрению спектра
амплитудно-модулированного непрерывного
сигнала. Для краткости в дальнейшем
будем называть его спектром
AM
сигнала. Ранее уже отмечалось, что всякое
колебание несинусоидальной формы имеет
сложный спектр, поскольку содержит
множество гармоник. Сигнал АМ является
сигналом сложной формы, что видно из
рис.1.12,а. Для того чтобы разобраться,
что же собой представляет спектр AM
сигнала, максимально упростим задачу.
Начнем с простейшего случая, когда
модулирующая функция u(t)
представляет
собой косинусоидальное колебание низкой
частоты
 ,
которое можно записать в виде
,
которое можно записать в виде
 .
.
Подставляя
это выражение в (1.5) и полагая начальную
фазу
 ,
получим следующую формулу для AM
сигнала.
,
получим следующую формулу для AM
сигнала.
 ,
(1.6)
,
(1.6)
где
 -
коэффициент глубины модуляции;
-
коэффициент глубины модуляции;
 -
частота несущей;
-
частота несущей;
 -
частота модулирующего сигнала u(t)
,
-
частота модулирующего сигнала u(t)
,
Для
непрерывных сигналов выбирают
 ,
чтобы исключить специфические искажения
- перемодуляцию. На практике величина
,
чтобы исключить специфические искажения
- перемодуляцию. На практике величина
 =0,3-0,5.
В случае же дискретных сигналов при
передаче посылки (1) величина
=0,3-0,5.
В случае же дискретных сигналов при
передаче посылки (1) величина
 ,
а при передаче паузы (0) величина
,
а при передаче паузы (0) величина
 .
Но здесь модулирующая функция u(t)
будет более сложной, а не синусоидальной.
.
Но здесь модулирующая функция u(t)
будет более сложной, а не синусоидальной.
Вернемся
к случаю, когда
 .
После соответствующих перемножений
формула (1.6) преобразуется к следующему
виду:
.
После соответствующих перемножений
формула (1.6) преобразуется к следующему
виду:
 . (1.7)
. (1.7)
Из
этой формулы видно, что такой AM
сигнал содержит три составляющих:
колебание несущей частоты
 и две боковые частоты:
и две боковые частоты:
 и
и
 .
Это и есть спектр AM
сигнала (рис.1.13,а).
.
Это и есть спектр AM
сигнала (рис.1.13,а).
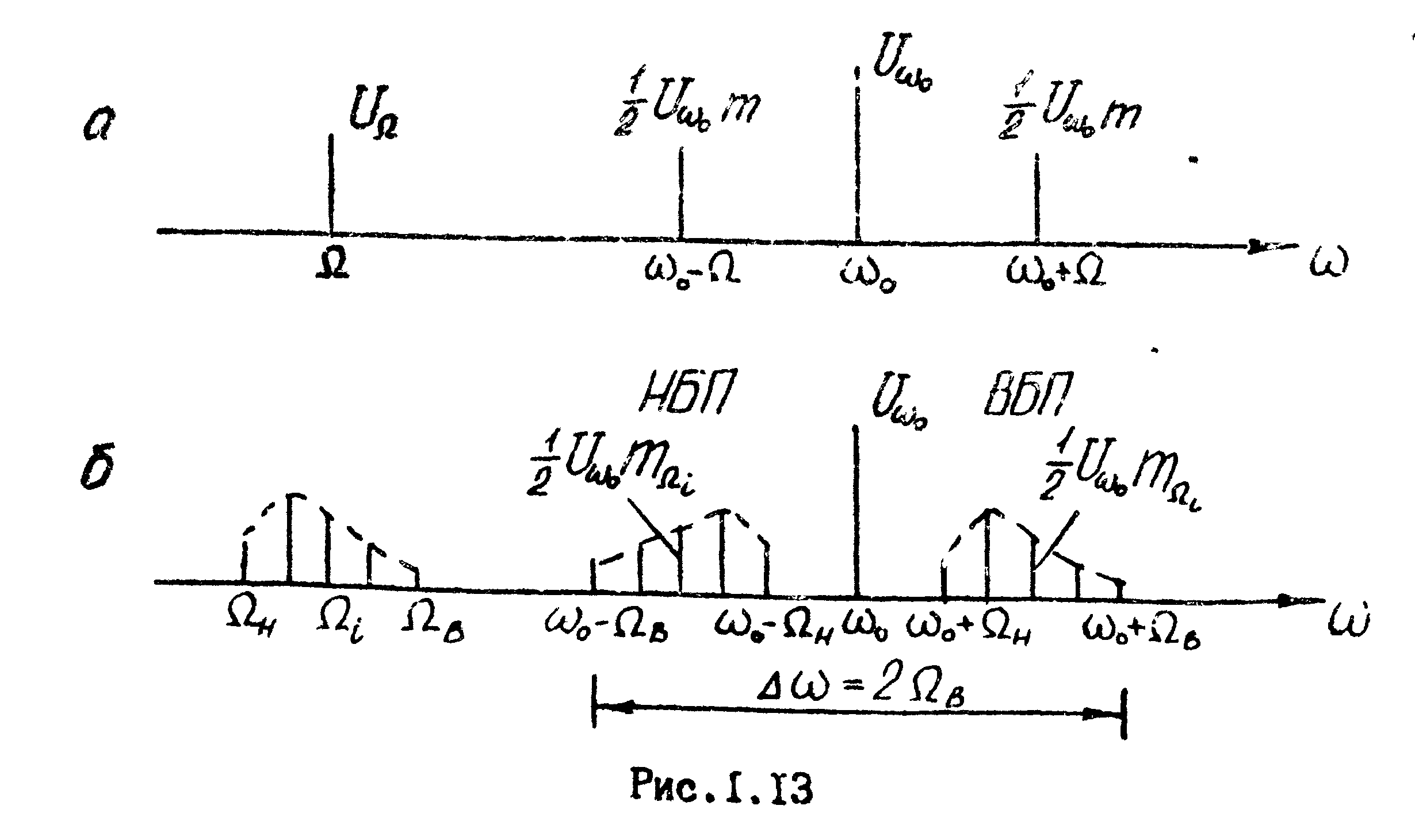
Амплитуды боковых частот одинаковы и пропорциональны коэффициенту глубины модуляции m .
Мощность
AM
сигнала зависит от величины m
. При этом мощность несущей частоты,
равная
 ,
неизменна, а мощность каждой боковой
частоты равна
,
неизменна, а мощность каждой боковой
частоты равна
 .
.
Интересно
отметить, что боковые частоты
 и
и
 представляют
собой зеркальное отображение друг друга
по отношению к несущей частоте
представляют
собой зеркальное отображение друг друга
по отношению к несущей частоте
 . Они несут одну и ту же информацию о
передаваемом сигнале. Несущая же частота
вообще не несет никакой информации,
хотя и потребляет 50 0/0
мощности.
То, что именно боковые составляющие
несут информацию , подтверждает следующий
факт. При отсутствии модулирующего
сигнала m=0
и боковые составляющие
. Они несут одну и ту же информацию о
передаваемом сигнале. Несущая же частота
вообще не несет никакой информации,
хотя и потребляет 50 0/0
мощности.
То, что именно боковые составляющие
несут информацию , подтверждает следующий
факт. При отсутствии модулирующего
сигнала m=0
и боковые составляющие
 исчезают,
а остается только колебание несущей
частоты
исчезают,
а остается только колебание несущей
частоты
 . Это и есть исходный материальный
носитель, у которого параметры
. Это и есть исходный материальный
носитель, у которого параметры
 ,
,
 и
и
 постоянны, а значит, не несут никакой
информации. Этот принцип сохраняется
и для тек случаев, когда модулирующая
функция
постоянны, а значит, не несут никакой
информации. Этот принцип сохраняется
и для тек случаев, когда модулирующая
функция
 имеет любую форму. При рассмотрении
непрерывных сигналов было установлено,
что речевой сигнал представляет собой
сложную модулирующую функцию. Это видно
из начертания фонем и спектрального
состава формант. Даже при ограничении
полосы спектра речи рамками канала ТЧ,
модулирующая функция
имеет любую форму. При рассмотрении
непрерывных сигналов было установлено,
что речевой сигнал представляет собой
сложную модулирующую функцию. Это видно
из начертания фонем и спектрального
состава формант. Даже при ограничении
полосы спектра речи рамками канала ТЧ,
модулирующая функция
 будет
содержать множество колебаний с частотами
от
будет
содержать множество колебаний с частотами
от
 300 Гц до
300 Гц до
 3400 Гц (
3400 Гц ( и
и
 -
соответственно нижняя и верхняя частота
канала ТЧ). Даже не производя математических
выкладок, можно увидеть, что, подставляя
в формулу (1.5) модулирующую функцию
-
соответственно нижняя и верхняя частота
канала ТЧ). Даже не производя математических
выкладок, можно увидеть, что, подставляя
в формулу (1.5) модулирующую функцию
 ,
содержащую множество колебаний в
диапазоне
частот от
,
содержащую множество колебаний в
диапазоне
частот от
 до
до
 ,
в результате будет получено то же самое
колебание несущей частоты
,
в результате будет получено то же самое
колебание несущей частоты
 и две боковые
полосы частот вида
и две боковые
полосы частот вида
 и
и
 .
Колебания
.
Колебания
 называют
верх-ней
боковой полосой,
а колебания
называют
верх-ней
боковой полосой,
а колебания
 - нижней
боковой поло-сой.
Таким образом, спектр непрерывного AM
сигнала в
общем
случае состоит из двух боковых голос,
несущих одну и ту же информацию, которые
расположены симметрично по отношению
к несущей
- нижней
боковой поло-сой.
Таким образом, спектр непрерывного AM
сигнала в
общем
случае состоит из двух боковых голос,
несущих одну и ту же информацию, которые
расположены симметрично по отношению
к несущей
 (рис.1З,б).
(рис.1З,б).
Из
рис.1.13,б видно, что полоса, занимаемая
спектром непрерывного AM
сигнала, равна
 .
Такой сигнал имеет ряд
недостатков.
Во-первых, в энергетическом отношении
он нерационален, так как половина
мощности здесь тратится на несущую, а
оставшаяся мощность делится пополам
между информационными боковыми полосами.
Следовательно, мощность передатчика
используется крайне неэффективно.
Во-вторых, для передачи такого сигнала
полосу пропускания канала связи нужно
иметь в два раза больше по сравнению с
необходимой полосой для передачи
низкочас-тотного первичного сигнала,
в рассматриваемом случае речевого
сигнала. В-третьих, при передаче AM
сигнала по каналу связи с переменными
параметрами в случае замирания несущего
колебания
.
Такой сигнал имеет ряд
недостатков.
Во-первых, в энергетическом отношении
он нерационален, так как половина
мощности здесь тратится на несущую, а
оставшаяся мощность делится пополам
между информационными боковыми полосами.
Следовательно, мощность передатчика
используется крайне неэффективно.
Во-вторых, для передачи такого сигнала
полосу пропускания канала связи нужно
иметь в два раза больше по сравнению с
необходимой полосой для передачи
низкочас-тотного первичного сигнала,
в рассматриваемом случае речевого
сигнала. В-третьих, при передаче AM
сигнала по каналу связи с переменными
параметрами в случае замирания несущего
колебания
 может
произойти полное нарушение связи.
может
произойти полное нарушение связи.
Перечисленные недостатки резко ограничили применение этого вида модуляции в системах связи. Однако, именно амплитудная модуляция породила балансную и однополосную модуляцию.
Балансная
модуляция (БМ) отличается от
AM
отсутствием несущего колебания
 . В этом случае вся мощность передатчика
делится поровну между верхней и нижней
информационными полосами, что существенно
повышает помехоустойчивость связи.
. В этом случае вся мощность передатчика
делится поровну между верхней и нижней
информационными полосами, что существенно
повышает помехоустойчивость связи.
При
однополосной модуляции (ОМ) подавляется
несущая и одна боковая полоса. Это
позволяет весьма экономно использовать
отводимую для связи полосу частот, так
как ширина спектра однополосного сигнала
(ВБП или НБП) равна ширине спектра
модулирующей функции
 ,
т.е. речевого сигнала. Теперь вся мощность
передатчика тратится только на полезный
сигнал. Кроме того, однополосный сигнал
более устойчив к замираниям, так как в
нем отсутствует несущее колебание с
частотой
,
т.е. речевого сигнала. Теперь вся мощность
передатчика тратится только на полезный
сигнал. Кроме того, однополосный сигнал
более устойчив к замираниям, так как в
нем отсутствует несущее колебание с
частотой
 .
Все это дает возможность в существенной
мере улучшить такие показатели системы
связи, как помехоустойчивость и
достоверность передачи. Вот почему
однополосные сигналы находят самое
широкое применение в системах проводной
и радиосвязи.
.
Все это дает возможность в существенной
мере улучшить такие показатели системы
связи, как помехоустойчивость и
достоверность передачи. Вот почему
однополосные сигналы находят самое
широкое применение в системах проводной
и радиосвязи.
Теперь
перейдем к рассмотрению вопроса о
спектрах дискретных
амплитудно-манипулированных сигналов
или сигналов амплитудного
телеграфирования (AT).
При AT
возможна работа незатухающими и
тональ-ными колебаниями. Случай AT
незатухающими колебаниями показан на
рис.1.12,б. Остановимся только на этом
режиме работы поскольку он является
основным в дискретных системах связи.
В 1.1.2 при рассмотрении последовательности
импульсов (рис.1.8,а) было показано, что
их спектр состоит из нечетных гармонических
составляющих FМ,
3 FМ,
5 FМ
и т.д. Сигнал же амплитудной телеграфии
- это высокочастотное колебание с
частотой
 .
Поскольку амплитудная манипуляция есть
процесс перемножения колебаний
.
Поскольку амплитудная манипуляция есть
процесс перемножения колебаний
 и FМ,
3 FМ,
5 FМ
и т.д., то результирующий сигнал будет
представлять собой несущее колебание
и FМ,
3 FМ,
5 FМ
и т.д., то результирующий сигнал будет
представлять собой несущее колебание
 и ряд боковых
составляющих вида
и ряд боковых
составляющих вида
 FМ,
FМ,
 3FМ
и т.д., интенсивность
которых быстро убывает с ростом их
порядкового номера. На практике
полосу спектра сигнала AT
ограничивают, исходя из соотношения
3FМ
и т.д., интенсивность
которых быстро убывает с ростом их
порядкового номера. На практике
полосу спектра сигнала AT
ограничивают, исходя из соотношения
 ,
где
,
где
 FМ
- скорость телеграфирования. Этой
полосы вполне достаточно, чтобы
восстановить на приемной стороне
передаваемое дискретное сообщение.
FМ
- скорость телеграфирования. Этой
полосы вполне достаточно, чтобы
восстановить на приемной стороне
передаваемое дискретное сообщение.
Частотная модуляция
При
частотной модуляции (ЧМ) изменяется
частота высокочастотного несущего
колебания (1.1) пропорционально
 .
Особенностью частотной модуляций
является то, что амплитуда этого
колебания остается неизменной во
времени. Поэтому формулу для
высокочастотного колебания (1.1) с
постоянной амплитудой, но переменной
частотой теперь можно представить
следующим выражением:
.
Особенностью частотной модуляций
является то, что амплитуда этого
колебания остается неизменной во
времени. Поэтому формулу для
высокочастотного колебания (1.1) с
постоянной амплитудой, но переменной
частотой теперь можно представить
следующим выражением:
 (1.8)
(1.8)
где
 - мгновенная фаза.
- мгновенная фаза.
Дело
в том, что фаза и частота колебания
взаимосвязаны между собой . Для
синусоидального колебания
 ,
т.е. фаза растет пропорционально времени.
Если колебание представить вектором,
то это значит, что он вращается равномерно
с постоянной угловой скоростью
,
т.е. фаза растет пропорционально времени.
Если колебание представить вектором,
то это значит, что он вращается равномерно
с постоянной угловой скоростью
 .
В случае же несинусоидального
колебания частота непостоянна и вектор
вращается с переменной скоростью
.
В случае же несинусоидального
колебания частота непостоянна и вектор
вращается с переменной скоростью
 .
Мгновенное значение частоты определяется
как производная по времени от фазы, т.е.
.
Мгновенное значение частоты определяется
как производная по времени от фазы, т.е.
 . Из этого выражения можно найти
переменную фазу колебания. Она равна
. Из этого выражения можно найти
переменную фазу колебания. Она равна
 .
.Если подставить это выражение в
формулу (1.8), то получим
.
.Если подставить это выражение в
формулу (1.8), то получим
 .
Здесь
.
Здесь
 определяется выражением (1.3). Подставляя
значение
определяется выражением (1.3). Подставляя
значение
 под знак интеграла, получим
под знак интеграла, получим
 , (1.9)
, (1.9)
где
 -
частотное отклонение от
-
частотное отклонение от
 или девиация частоты.
или девиация частоты.
Выражение
(1.9) описывает частотно-модулированный
(ЧМ) сигнал. Если до модуляции частота
колебания (1.1) была постоянна, то теперь
она будет изменяться по закону
низкочастотного первичного сигнала
или, что то же самое, модулирующей функции
 .
Она может быть как непрерывной, так и
дискретной.
.
Она может быть как непрерывной, так и
дискретной.
Для
непрерывного сообщения функции
 ,
,
 и
и
 приведены
на рис.1.14,
а.
приведены
на рис.1.14,
а.

рис.1.14 рис.1.15
Для
дискретного сообщения, закодированного
двоичным кодом, модулирующая функция
 будет равна
либо 1, либо 0. В этом случае частотную
модуляцию называют частотной
манипуляцией
(рис.1,14,б).
будет равна
либо 1, либо 0. В этом случае частотную
модуляцию называют частотной
манипуляцией
(рис.1,14,б).
Модуляция несущей частоты производится в устройстве, которое называется частотным модулятором. В состав частотного модулятора входят контур, параметры, а значит, и частота которого меняются под воздействием модулирующего сигнала.
ЧМ сигналы находят широкое применение в каналах телеграфирования, поэтому частотную манипуляцию называют частотным телеграфирова-нием (ЧТ). Режим ЧТ относится к видам работы с активной паузой и обладает повышенной помехоустойчивостью по отношению к AT.
Остановимся несколько подробней на рассмотрение частотного телегравирования, поскольку оно находит широкое применение в различных системах проводной и радиосвязи.
Принцип ЧТ состоит в том, что
при передаче токовой посылки передает-ся
колебание с частотой
 ,
а при передачи бестоковой посылки -
колебание с частотой
,
а при передачи бестоковой посылки -
колебание с частотой
 . Согласно рекомендациям МККТТ принято,
что
. Согласно рекомендациям МККТТ принято,
что
 >
> [5].
[5].
В зависимости от вида кода различают:
- простые системы ЧТ, в которых применяется двоичный частотный код (m =2);
- система двойного частотного телеграфирования (ДЧТ) с основанием частотного кода m= 4;
- системы многопозиционного частотного телеграфирования (МЧТ) с основанием частотного кода m > 2.
Отсюда следует, что ДЧТ является частным случаем МЧТ. На практике наибольшее распространение получили системы связи ЧТ и ДЧТ.
Основными параметрами сигнала ЧТ (рис. 1. 15) являются:
-
Среднее значение частоты, вокруг которой осуществляется манипуляция частот токовой посылки
 и бестоковой
посылки
и бестоковой
посылки

 .
(1.10)
.
(1.10)
2. Разнос частот токовой и бестоковой посылки
 . (1.11)
. (1.11)
3. Девиация частоты, характеризующая отклонение частоты от ее среднего значения
 (1.12)
(1.12)
4. Индекс частотной манипуляции
 , (1.13)
, (1.13)
где
 - частота манипуляции сигнала, Гц;
- частота манипуляции сигнала, Гц;
 -
скорость телеграфирования, Бод.
-
скорость телеграфирования, Бод.
Скорость передачи (телеграфирования) определяет основную частоту манипуляции или частоту следования импульсов (рис.1.8,а) и связана с ней соотношением
 .
(1.14)
.
(1.14)
Рассмотрим теперь принцип ДЧТ. Он состоит в том, что один передатчик одновременно передает две различные информации двум корреспондентам. Для этого используют четыре различных частоты.
Если передачу посылки от телеграфного аппарата обозначит (+), а паузу - (-), то при одновременной работе двух аппаратов можно осуществись следующую группировку сигналов с точки зрения передачи в канал связи одной из частот:
|
1 канал |
+ |
- |
+ |
- |
|
2 канал |
- |
+ |
+ |
- |
|
Формируемые сигналы |
|
|
|
|




Отсюда следует, что одновременная двухканальная работа при ДЧТ достигается путем передачи в канал связи колебания только одной частоты, на которую расходуется вся мощность передатчика.
При независимой работе двух телеграфных аппаратов в канале связи вместо одной частоты нужно передавать одновременно две частоты. В этом случае мощность передатчика делится пополам между передаваемыми сигналами, что ведет к ухудшению такого показателя системы связи, как ее помехоустойчивость,
Нa рис. 1.16 показан сигнал ДЧТ. Из рисунка видно, что при ДЧТ индекс частотной манипуляции в три раза больше, чем при ЧТ.
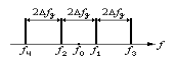
рис.1.16
Вернемся
теперь к рассмотрению спектров ЧМ
сигналов. Для непрерывного сигнала
опять возьмем простейший случай, когда
модулирующая функция
 .
Тогда формула (1.9) преобразуется к виду
.
Тогда формула (1.9) преобразуется к виду
 (1.15)
(1.15)
где
 ;
;
 -
индекс частотной модуляции.
-
индекс частотной модуляции.
Выражение
для индекса частотной модуляции совпадает
с формулой (1.13). Действительно,
 ,
где
,
где
 - частота модуляции
(манипуляции).
- частота модуляции
(манипуляции).
Вычисление
выражения (1.15) показывает, что теоретически
спектр ЧМ сигнала бесконечен и состоит
из колебаний вида
 ,
где K
= I, 2, 3 ...
Практически же ширину этого спектра
можно ограничите, так как с ростом К
амплитуда колебаний быстро убывает.
Установлено [2,5], что полоса спектра ЧМ
сигнала в общем случае зависит как
от девиации частоты
,
где K
= I, 2, 3 ...
Практически же ширину этого спектра
можно ограничите, так как с ростом К
амплитуда колебаний быстро убывает.
Установлено [2,5], что полоса спектра ЧМ
сигнала в общем случае зависит как
от девиации частоты
 ,
так и от значения модулирующей частоты
,
так и от значения модулирующей частоты
 .
Другими словами, ширина спектра зависит
от величины
.
Другими словами, ширина спектра зависит
от величины
 . При индексах частотной модуляции
. При индексах частотной модуляции

 1
ширина
спектра ЧМ сигнала такая же, как у AM
сигнала, т.е. равна удвоенной частоте
модуляции. Однако, с ростом величины mr
ширина
спектра ЧМ сигнала начинает возрастать
и при
1
ширина
спектра ЧМ сигнала такая же, как у AM
сигнала, т.е. равна удвоенной частоте
модуляции. Однако, с ростом величины mr
ширина
спектра ЧМ сигнала начинает возрастать
и при
 >> 1
она равна
>> 1
она равна
 ,
т.е. удвоенной девиации частоты. В
процессе модуляции мгновенная частота
может принимать любое значение внутри
интервала
,
т.е. удвоенной девиации частоты. В
процессе модуляции мгновенная частота
может принимать любое значение внутри
интервала .
Следует отметить, что величина
.
Следует отметить, что величина
 учитывает
обе боковые полосы ЧМ сигнала, каждая
из которых при больших значениях
учитывает
обе боковые полосы ЧМ сигнала, каждая
из которых при больших значениях
 равна
равна
 .
Сама же величина
.
Сама же величина
 выбирается
по нашему усмотрению при проектировании
системы связи и является некоторой
постоянной.
выбирается
по нашему усмотрению при проектировании
системы связи и является некоторой
постоянной.
Перейдем
к рассмотрению спектра ЧМ дискретного
сигнала. В 1.3 было показано, что даже при
передаче простой последовательности
импульсов, спектр сигнала состоит из
ряда нечетных гармоник

 ,
,
 и т.д., кратных основной частоте
манипуляции
и т.д., кратных основной частоте
манипуляции
 .
.
Для
того, чтобы найти спектр сигнала ЧТ,
нужно в формулу (1.9) подставить
аналитическое выражение, описывающее
импульсный модули-рующий сигнал.
Опуская математические выкладки,
отметим, что спектр такого сигнала
состоит из несущей частоты и бесконечного
числа частотных составляющих нижней и
верхней боковых полос. Амплитуда
частотных составляющих и ширина спектра
главным образом определяются величиной
индекса частотной манипуляции
 и номером гармоники модулирующего
сигнала.
и номером гармоники модулирующего
сигнала.
При

 спектры
сигналов AT
и ЧТ почти не отличаются. С ростом
величины
спектры
сигналов AT
и ЧТ почти не отличаются. С ростом
величины
 спектр
сигнала ЧТ начинает расширяться.
спектр
сигнала ЧТ начинает расширяться.
На практике ширину спектра сигнала ЧТ рассчитывают по формуле
 . (1.16)
. (1.16)
Для
любого вида ЧМ сигналов помехоустойчивость
связи повышается с ростом величины
 ,
а это ведет к расширению спектра сигнала.
Поэтому частотную модуляцию применяют,
как правило, в широкополосных каналах
связи.
,
а это ведет к расширению спектра сигнала.
Поэтому частотную модуляцию применяют,
как правило, в широкополосных каналах
связи.