

4.3. Борьба с флуктуационными, сосредоточенными и импульсными помехами.
4.3.1 Флуктуационные помехи
Борьба с флуктуационными помехами (шумами) является одной из центральных задач обеспечения помехоустойчивости систем радиосвязи. Флуктуационные помехи всегда присутствуют в канале радиосвязи и их невозможно полностью подавить из-за их физической природы. Выбросы флуктуационной помехи могут иметь значительную величину и ее порой трудно отличать от сигнала, даже в его отсутствие. С другой стороны, интерференция сигнала и помехи может привести к тому, что суммарное колебание окажется ниже порога регистрации и сигнал не будет зафиксирован.
Для борьбы с флуктуационными помехами может использоваться любой из методов, рассмотренных в главе 4.2. Однако ниже остановимся главным образом на тех методах борьбы с флуктуационными помехами, которые позволяют увеличить среднюю мощность сигнала, поскольку качество связи определяется отношением средней мощности сигнала к мощности шума в полосе пропускания приемника.
Известно, что при передаче непрерывных сигналов средняя мощность передатчика оказывается значительно ниже максимальной. Самым очевидным способом повышения средней мощности сигнала в этом случае является сокращение динамического диапазона сигнала. Этого можно достичь путем преобразования непрерывных сигналов в цифровые, а применительно к речевым сигналам, еще и клипированием или компандированием сигнала (см. главу 3.1.2).
В реальных средствах радиосвязи наиболее распространенным методом борьбы с флуктуационными помехами является фильтрация сигналов. Ниже остановимся на отыскании оптимальных условий фильтрации дискретных и непрерывных сигналов.
При фильтрации дискретных сигналов uc1(t) и uc2(t), которые могут представлять двоичный сигнал, условие оптимального приема при действии флуктуационных помех будет определяться неравенством [2]:
 . (4.6)
. (4.6)
В (4.6) сигнал x(t) на входе приемника представляет собой сумму переданного сигнала uc(t) и помехи un(t) на конечном интервале 0 < t < Т.
Оптимальным приемником можно считать такой приемник, который воспроизводит переданный сигнал uc(t) с наименьшим среднеквадратическим отклонением от принятого сигнала x(t).
В.А. Котельников предложил оценивать качество работы приёмника на основе минимума полной вероятности ошибки (см. главу 2 формулу (2.17)). Приёмник, работающий на этом принципе был назван идеальным приёмником, а сам критерий, положенный в основу оценки качества его работы, критерием идеального наблюдателя. На практике наибольшее распространение получили критерий идеального наблюдателя и критерий Неймана-Пирсона, в соответствии с которым приёмник минимизирует вероятность пропуска цели Рпц при заданном значении вероятности ложной тревоги Рлт. В дальнейшем будем придерживаться определения оптимальности приёмника в смысле Котельникова и определим структуру такого оптимального приёмника.
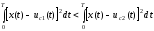
Одной из схем, реализующей условие (4.6), может быть схема приемника, приведенная на рис. 4.6. Такой приемник был предложен В. Л. Котельниковым
В
этом приемнике генераторы опорных
сигналов Г1
и Г2
формируют
соответственно передаваемые сигналы
uc1,
и uc2.С
вычитающих
устройств В сигналы вида х
— ис1,
и
х
— исг
поступают
на квадратирующие устройства KB
и преобразуются к виду (х
– ис1)2
и
(х
— uc2)2.
Затем
эти сигналы
интегрируются
на
интервале
Т и после
интеграторов
II
колебания
 и
и
 подаются
на
решающее устройство РУ, представляющее
собой схему
сравнения
и
выбора.
подаются
на
решающее устройство РУ, представляющее
собой схему
сравнения
и
выбора.
Выражение (4.6) можно преобразовать к эквивалентному неравенству, если выполнить операцию возведения в квадрат подынтегральных выражений
 ,
(4.7)
,
(4.7)
где
 —
энергия
сигнала.
—
энергия
сигнала.
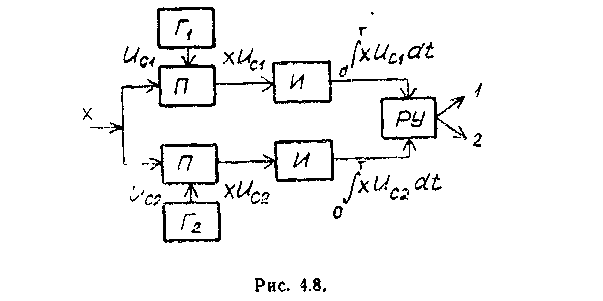
Условие
(4.7)
можно
реализовать с помощью схемы так
называемого
оптимального порогового приемника
(рис. 4.7).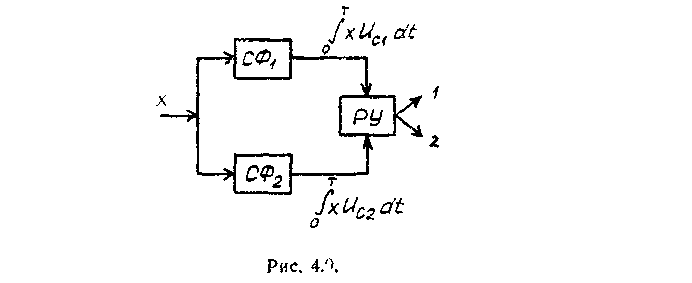
Принимаемое
колебание и разностный сигнал
 перемножаются
(П), после чего результат
перемножаются
(П), после чего результат
 интегрируется
(И) и сравнивается с постоянным порогом,
равным 0,5 (E2-E1).
интегрируется
(И) и сравнивается с постоянным порогом,
равным 0,5 (E2-E1).

Оптимальный пороговый приемник проще приемника В. А. Котельникова и его целесообразно применять в каналах с аддитивными помехами. В каналах же с переменными параметрами, где уровень сигнала все время изменяется, необходимо порог автоматически регулировать, что является недостатком.
При равенстве энергий сигналов (Е2 = Е1) этот недостаток устраняется, поскольку порог равен нулю и решающее устройство РУ выдает только лишь знак сигнала.
Следует заметить, что в случае E2=E1 в приемнике В. А. Котельникова отпадает необходимость в операции квадратирования и он преобразуется в корреляционный когерентный приемник (рис. 4.8), реализующий следующий алгоритм работы:
 . (4.8)
. (4.8)
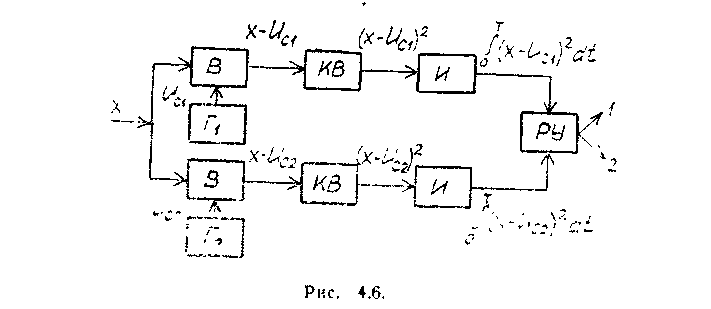
Условие (4.8) можно также реализовать с помощью оптимального приемника на согласованных фильтрах (рис. 4.9).

При отсутствии помех сигнал на выходе каждого согласованного фильтра с точностью до постоянного множителя совпадает с автокорреляционной функцией входного сигнала. При наличии помех напряжение на выходе каждого согласованного фильтра будет пропорционально функции взаимной корреляции принятого сигнала x(t) и переданного сигнала uc(t).
Первый
согласованный фильтр СФ1 выполняет
операцию
 ,
а
второй согласованный фильтр СФ2 —
операцию
,
а
второй согласованный фильтр СФ2 —
операцию
 ,
после
чего напряжение с выхода каждого
фильтра
поступает на решающее устройство РУ.
,
после
чего напряжение с выхода каждого
фильтра
поступает на решающее устройство РУ.
Величина отклика на выходе согласованного фильтра и на выходе коррелятора при когерентном приеме одинакова и равна [3, 5].
 . (4.9)
. (4.9)
Из (4.9) следует, что отношение сигнал/шум на выходе оптимального приемника не зависит от формы входного сигнала и ее можно выбирать из условия обеспечения наиболее эффективной борьбы с другими видами помех.
По существу, согласованный фильтр эквивалентен коррелятору. Однако реализовать согласованный фильтр, особенно для ШПС, труднее, чем коррелятор.
На
практике при приеме дискретных сигналов
широко используется
квазиоптимальная фильтрация, когда в
приемнике применяются
фильтры, согласованные с сигналом лишь
по полосе. В случае
приема узкополосных дискретных сигналов
длительностью Тс
в
зависимости от формы сигнала необходимо
правильно выбирать
амплитудно-частотную характеристику
фильтра. Это имеет
важное значение для получения максимального
отношения сигнал/шум
на его выходе. Сказанное иллюстрируется
таблицей 4.1,
в которой для различных по форме сигналов
и АЧХ фильтров
приведены максимальные нормированные
значения отношения
сигнал/шум
 на выходе согласованных по полосе
фильтров.
на выходе согласованных по полосе
фильтров.
Таблица 4.1
|
Вид огибающей сигнала |
ЛЧХ фильтра |
|
|
|
Прямоугольная Прямоугольная Гауссова Гауссова
|
Прямоугольная Гауссова Прямоугольная Гауссова
|
1,37 0.72 0.72 0,63
|
0,91 0,94 0.94 1,0
|


В
таблице 4.1
 =
= — отношение сигнал/шум
на выходе фильтра, согласованного на
полосе с сигналом,
а h20
отношение сигнал/шум на выходе
согласованного фильтра.
Оптимальная полоса фильтра находится
из соотношения
— отношение сигнал/шум
на выходе фильтра, согласованного на
полосе с сигналом,
а h20
отношение сигнал/шум на выходе
согласованного фильтра.
Оптимальная полоса фильтра находится
из соотношения
 .
.
Из таблицы 4.1 видно, что при равенстве центральных частот сигнала и фильтра отношение сигнал/шум на входе решающей схемы при квазиоптимальной фильтрации по сравнению с оптимальной фильтрацией снижается незначительно. В то же время реализовать фильтр, согласованный с сигналом по полосе, значительно проще, чем согласованный фильтр. Этим, в частности, можно объяснить широкое применение в средствах радиосвязи фильтров, согласованных с сигналом только по полосе.
Рассмотрим некоторые особенности оптимального приема непрерывных сигналов при действии флуктуационных помех.
В главе 4.2 уже отмечалось, что оптимальная линейная фильтрация непрерывных сигналов базируется на теории Колмогорова-Винера, которая верна лишь для стационарных случайных процессов. Однако реальные непрерывные сигналы (телефонные,телеметрические, телевизионные и др.) не всегда являются стационарными, что не позволяет решить задачу построения оптимальных линейных фильтров на базе теории линейной фильтрации. В связи с этим на практике находят применение другие способы построения оптимальных приемников непрерывных сигналов.
Если бы передаваемый непрерывный сигнал был полностью известным, подобно тому, как это имеет место при передаче дискретных сигналов, то схемы оптимальных приемников для непрерывных сигналов не отличались бы от рассмотренных выше схем оптимальных приемников. Однако при передаче непрерывных сигналов получатель информации находится в более тяжелых условиях, поскольку он располагает лишь некоторой информацией о сигнале. Ему могут быть известны рабочая частота, вид модуляции, ширина спектра сигнала и т. п. Остальную же информацию он должен получить путем анализа принятого сигнала за некоторый предшествующий промежуток времени Т.
Анализ принятого колебания x(t) должен способствовать воспроизведению переданного сигнала uc(t) с минимальным среднеквадратическим отклонением.
Оптимальный приемник путем анализа принятого сигнала x(t) вычисляет плотность распределения вероятностей для всех возможных реализаций передаваемых сигналов. Решение задачи сводится к тому, чтобы вычислить функцию плотности распределения вероятностей .принятого сигнала x(t) за промежуток Т и выдать на выходе приемника ту реализацию передаваемого сигнала, для которой эта функция максимальна.
Нахождение плотности распределения вероятностей основано на вычислении взаимной корреляции между принятым колебанием x(t) и переданным ожидаемым сигналом uc(t). Плотность распределения вероятностей можно представить функцией [2]
 , (4.10)
, (4.10)
где N0 — постоянная спектральная плотность шума.
Так как сигнал uc(t) неизвестен, то вместо сигнала следует брать некоторое его оценочное значение v(t), которое в результате анализа колебания x(t) полагается близким к переданному сигналу. Поэтому приемник определяет не функцию h(u), а некоторую оценочную эквивалентную ей функцию h(v).
Поясним это положение. Если бы сигнал был полностью известен, как это имело место при приеме дискретных сообщений, то с помощью коррелятора или оптимального фильтра была бы найдена именно функция h(u). При передаче же непрерывных сообщений сигнал известен не полностью. Могут быть известны, как уже отмечалось, только некоторые его параметры, такие, как рабочая частота, вид модуляции, ширина спектра и некоторые другие. Сам же передаваемый сигнал неизвестен. При этом сигнал меняется непрерывно со временем и может принять любую форму. Наблюдая за принятым колебанием x(t) за предшествующий промежуток Т, приемник должен произвести оценку этого сигнала и вычислить оценочную функцию
 , (4.11)
, (4.11)
где v(t) — оценочное значение передаваемого сигнала на выходе приемника.
Для нахождения h(v) можно воспользоваться либо схемой следящего коррелятора (рис. 4.10), либо схемой, содержащей следящий фильтр, т. е. фильтр с переменными параметрами (рис. 4.11). Обе схемы имеют информационный канал, на выходе которого формируется оценочное значение v(t) передаваемого сигнала uс (t), а также канал обратной связи.

В
схеме следящего коррелятора (рис.
4.10)
обратный канал, содержащий
управляющий элемент УЭ и генератор Г,
служит для формирования
опорного сигнала, подаваемого на
перемножитель П,
на вход которого поступает колебание
x(t).
Управляющий
элемент
служит для изменения модулируемого
параметра рабочей частоты, формируемой
генератором Г, в соответствии с величиной
v(t).
Фильтр
нижних частот ФНЧ используется в
качестве
интегратора на интервале наблюдения
 (Fв
— верхняя
частота
в спектре передаваемого сигнала).
(Fв
— верхняя
частота
в спектре передаваемого сигнала).

В схеме со следящим фильтром (рис. 4.11) посредством обратного канала, содержащего УЭ, изменяются параметры фильтра СФ в соответствии со значением v(t). Поскольку величина v(t) непрерывно меняется, то и параметры фильтра также непрерывно изменяются, подстраиваясь под ожидаемый сигнал uс(t).
Следящие оптимальные приемники являются нелинейными устройствами, поэтому теорию оптимального приема непрерывных сигналов следует рассматривать как теорию оптимальной нелинейной фильтрации.
Следует отметить, что при действии в канале связи как аддитивной, так и мультипликативной помехи приемники, приведенные на рис. 4.10 и 4.11, должны быть дополнены системами автоматической регулировки усиления и фазовой автоподстройкой частоты, а при изменяющейся величине N0 — устройством измерения и выравнивания помех.
Таким образом, при оптимальном приеме сигналов, передаваемых по каналам с переменными параметрами и непостоянным уровнем помех, в приемнике должно автоматически осуществляться непрерывное слежение за формой сигнала и характером помехи, а это значит, что оптимальный приемник должен быть адаптивным.