

2.4. Скорость точек твердого тела в плоском движении. Мгновенный центр скоростей
Плоским называется движение твердого тела, при котором траектории всех его точек лежат в плоскостях, параллельных некоторой неподвижной плоскости.
Всякое перемещение плоской фигуры можно разложить на поступательное движение вместе с произвольно выбранной точкой О1, называемой полюсом, и на вращение фигуры вокруг этой точки (рис.2.13). Уравнения движения произвольной точки М плоской фигуры имеют вид
x
(2.4)
(2.5)
y = yO1 + x1sin + y1cos,
где x и y – координаты точки М в неподвижной системе координат; xO1 и yO1 – координаты полюса О1; x1 и y1 – координаты точки М в системе координат, жестко связанной с плоской фигурой; – угол поворота подвижной системы координат относительно неподвижной.
Проекции скорости точки М на неподвижные оси координат
vx = vO1x – (y – yO1); (2.5)
vy = vO1y + (x – xO1),
где vO1x и vO1y – проекции скорости полюса (начала подвижной системы координат) на неподвижные оси координат; = – проекция угловой скорости на ось z, перпендикулярную к плоскости движения.
Подставив в (2.5) значения координат x и y точки М из выражения (2.4), получим проекции скорости точки М на подвижные оси координат x1 и y1:
vx1 = vO1xcos + vO1ysin – y1;
vy1 = – vO1xsin + vO1ycos + x1.
Скорость точки М по известным проекциям

![]() .
.
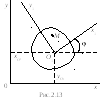
Скорости точек плоской фигуры могут быть найдены и графоаналитическим методом, основанным на использовании мгновенного центра скоростей этой фигуры. При плоском движении фигуры в каждый данный момент времени существует точка, скорость которой равна нулю, – мгновенный центр скоростей Р (рис.2.14). Скорость любой точки М плоской фигуры связана с вращением ее вокруг мгновенного центра скоростей. Ее величина равна произведению угловой скорости плоской фигуры на расстояние от точки М до мгновенного центра скоростей.
Рассмотрим способы нахождения мгновенного центра скоростей плоской фигуры:
Если известна скорость vO точки О и угловая скорость плоской фигуры (рис.2.14, а), то мгновенный центр скоростей находится на перпендикуляре, восстановленном к направлению скорости точки О, на расстоянии ОР = vO/.
Если известны скорости двух точек А и В плоской фигуры (рис.2.14, б), то мгновенный центр скоростей находится в точке пересечения перпендикуляров, восстановленных в точках А и В к векторам скоростей этих точек.
Если векторы скорости двух точек А и В плоской фигуры (рис.2.14, в) параллельны друг другу, перпендикулярны к отрезку АВ, направлены в одну сторону и не равны по величине, то мгновенный центр скоростей находится на продолжении АВ со стороны той точки, скорость которой меньше; расстояния от точек А и В до мгновенного центра скоростей пропорциональны скоростям точек. Если же скорости параллельны и равны друг другу, то мгновенный центр скоростей в данный момент не существует (находится в бесконечности), угловая скорость плоской фигуры в данный момент равна нулю (мгновенно-поступательное движение).
Если плоская фигура катится без скольжения по неподвижной кривой (рис.2.14, г), то мгновенный центр скоростей находится в точке соприкосновения фигуры с кривой.
В неподвижной системе координат положение мгновенного центра скоростей определяется формулами
![]() .
.
В подвижной системе осей координат, жестко связанной с плоской фигурой, координаты мгновенного центра скоростей
![]() .
.
A
B
а



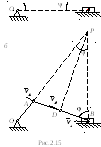
Пример 2.4. Кривошипно-шатунный механизм состоит из кривошипа ОА, шатуна АВ и ползуна В (рис.2.15, а). Кривошип вращается вокруг точки О согласно уравнению = 3t. Ползун В движется по горизонтальным направляющим, проходящим через точку О. Определить скорость ползуна В, когда ОАВ = 90, положение мгновенного центра скоростей шатуна АВ и его угловую скорость, если ОА = r = 2 м, АВ = l = 3,46 м. Найти в этом положении скорость точки D, делящей шатун пополам.
Решение. Решим задачу с использованием мгновенного центра скоростей. Угловая скорость кривошипа
![]() = 3 с-1.
= 3 с-1.
Скорость точки А
vА = r = 23 = 6 м/с.
Вектор
![]() перпендикулярен к кривошипу ОА.
Скорость шатуна В
перпендикулярен к кривошипу ОА.
Скорость шатуна В
![]() направлена по горизонтали ОВ.
Построив перпендикуляры к направлениям
скоростей точек А и В шатуна,
находим в их пересечении мгновенный
центр скоростей Р (рис.2.15, б).
направлена по горизонтали ОВ.
Построив перпендикуляры к направлениям
скоростей точек А и В шатуна,
находим в их пересечении мгновенный
центр скоростей Р (рис.2.15, б).
В треугольнике ОАВ сторона ОВ =![]() ,
следовательно, угол = 60,
угол АВО = = 30.
Угол АВР =
как образованный сторонами треугольника
АВР, перпендикулярными ОА и ОВ.
Аналогично угол АРВ = ;
из треугольника АВР следует, что
,
следовательно, угол = 60,
угол АВО = = 30.
Угол АВР =
как образованный сторонами треугольника
АВР, перпендикулярными ОА и ОВ.
Аналогично угол АРВ = ;
из треугольника АВР следует, что
![]() ;
;
![]()
Мгновенную угловую скорость шатуна найдем из условия
vA = r = АРмг,
откуда
![]() .
.
Скорость точки В определяется как произведение расстояния от этой точки до мгновенного центра скоростей на мг:
vB = ВРмг = 6,92 м/с.
Аналогично скорость точки D
vD = DРмг =![]() 6,25 м/с.
6,25 м/с.
Вектор скорости точки D
![]() перпендикулярен к DP.
перпендикулярен к DP.

Ответ: vB = 8,65 м/с, = 5 рад, vD = 5 м/с.
Задача 2.19. Катушка радиусом R катится по горизонтальной плоскости без скольжения (рис.2.16). На средней цилиндрической части катушки радиусом r намотана нить, конец которой В обладает при этом движении скоростью u в горизонтальном направлении. Определить скорость перемещения оси катушки.
Ответ:
![]() .
.
Задача 2.20. Колесо радиусом R = 0,5 м катится без скольжения по прямолинейному участку пути; скорость его центра v0 постоянна и равна 10 м/с. Найти скорости концов М1, М2, М3, М4 вертикального и горизонтального диаметров колеса. Определить угловую скорость колеса.
Ответ: = 20 с-1; vM1 = 0; vM2 = 10 м/с; vM3 = 20 м/с; vM4 = 10 м/с.
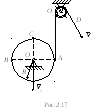 адача 2.21.
Цилиндр радиусом R обмотан тросом,
перекинутым через блок О (рис.2.17).
Конец троса тянут со скоростью
адача 2.21.
Цилиндр радиусом R обмотан тросом,
перекинутым через блок О (рис.2.17).
Конец троса тянут со скоростью
![]() ,
в то время как центр цилиндра имеет
скорость
,
в то время как центр цилиндра имеет
скорость
![]() .
Определить угловую скорость цилиндра,
считая участок троса от цилиндра до
блока вертикальным. Найти скорости
точки В на горизонтальном диаметре
цилиндра и точки С на вертикальном
диаметре.
.
Определить угловую скорость цилиндра,
считая участок троса от цилиндра до
блока вертикальным. Найти скорости
точки В на горизонтальном диаметре
цилиндра и точки С на вертикальном
диаметре.
Ответ:
![]() ;
;
![]() ;
;
![]() .
.
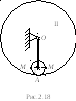
Задача 2.22. В планетарном механизме
(рис.2.18) кривошип ОА
вращается с угловой скоростью 0
и приводит в движение шестерню I радиусом
![]() ,
которая находится во внутреннем
зацеплении с шестерней II радиусом R.
Определить скорости точек M1
и M2 шестерни I, находящихся на
концах ее диаметра, перпендикулярного
кривошипу, если шестерня II вращается
с угловой скоростью 2 = 30.
,
которая находится во внутреннем
зацеплении с шестерней II радиусом R.
Определить скорости точек M1
и M2 шестерни I, находящихся на
концах ее диаметра, перпендикулярного
кривошипу, если шестерня II вращается
с угловой скоростью 2 = 30.
![]() ;
при одинаковых направлениях вращения
шестерни II и кривошипа
;
при одинаковых направлениях вращения
шестерни II и кривошипа
![]() .
.
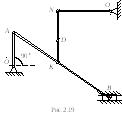
Задача 2.23. Определить величину скорости точки D шатуна NK в положении механизма, изображенном на рис.2.19, когда коромысло O1N перпендикулярно к шатуну NK и параллельно направляющим ползуна В, а скорость ползуна В равна v. Принять DK = NK/3.
Ответ:
![]() .
.