

4. Динамика системы материальных точек
4.1. Геометрия масс и теорема о движении центра масс
Центр масс механической системы движется как материальная точка, масса которой равна массе всей системы и к которой приложен главный вектор внешних сил, действующих на систему. Для каждой точки системы
![]() ,
i = 1, 2, …, n,
,
i = 1, 2, …, n,
где mi – масса i-й точки;
![]() – ее ускорение.
– ее ускорение.
Для системы в целом
![]()
где
![]() – главный вектор внешних сил;
– главный вектор внешних сил;
![]() – главный вектор внутренних сил,
– главный вектор внутренних сил,
![]() .
.
Тогда
![]()
где
![]() – ускорение центра масс системы; m
– масса всей системы.
– ускорение центра масс системы; m
– масса всей системы.
Проектируя последнее равенство на оси координат, получим дифференциальные уравнения движения центра масс системы:
![]()
где
![]() – ускорения центра масс при движении
вдоль осей x, y, z;
– ускорения центра масс при движении
вдоль осей x, y, z;
![]() – проекции главного вектора внешних
сил на соответствующие оси координат.
– проекции главного вектора внешних
сил на соответствующие оси координат.
Решение. На систему тел – статор
с кожухом и ротор с валом – действуют
внешние силы тяжести
![]() и
и
![]() ,
суммарная вертикальная реакция Рв
плоскости фундамента и суммарная
горизонтальная реакция Рг
болтов. Построив оси координат от центра
тяжести статора С1, введем
угловую координату
вала. При равномерном вращении вала
,
суммарная вертикальная реакция Рв
плоскости фундамента и суммарная
горизонтальная реакция Рг
болтов. Построив оси координат от центра
тяжести статора С1, введем
угловую координату
вала. При равномерном вращении вала
![]()
Координата центра масс системы
![]()
где m1 – масса статора с кожухом; m2 – масса ротора с болтами.
Дважды дифференцируя по времени это выражение, найдем
![]()
При этом проекция на ось главного вектора
внешних сил
![]() .
Тогда из первого дифференциального
уравнения движения центра масс системы
получим
.
Тогда из первого дифференциального
уравнения движения центра масс системы
получим
![]() .
.
Наибольшее значение модуля
![]() достигается при
достигается при
![]()
![]() .
.



Ответ: xС = 0,231 м.
Задача 4.2. Скрепер с породой общей массой m = 500 кг поднимается по наклонной плоскости бремсберга с помощью троса, наматываемого на барабан 2 скреперной лебедки (рис.4.3). Определить модуль главного вектора внешних сил, действующих на скрепер 1, если угловое ускорение барабана 2 лебедки = 5 рад/с, а радиус барабана R = 0,4 м.
Ответ: F = 1000 Н.
Задача 4.3. Центр масс сателлита С движется по окружности радиусом R = 1,3 м вокруг центрального зубчатого колеса согласно закону S = 4t (рис.4.4). Определить модуль главного вектора внешних сил, приложенных к сателлиту, если его масса m = 15 кг.
Ответ: F = 185 Н.

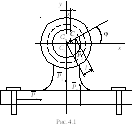
 адача 4.4.
Ячейка кристаллической решетки некоторого
минерала (рис.4.5) состоит
из восьми атомов массой m в вершинах
ячейки и одного атома с массой M = 2m
в центре. Определить момент инерции
системы Jx (относительно
оси x), если ячейка представляет
собой куб с ребром l. Массой
промежуточного материала ячейки
пренебречь.
адача 4.4.
Ячейка кристаллической решетки некоторого
минерала (рис.4.5) состоит
из восьми атомов массой m в вершинах
ячейки и одного атома с массой M = 2m
в центре. Определить момент инерции
системы Jx (относительно
оси x), если ячейка представляет
собой куб с ребром l. Массой
промежуточного материала ячейки
пренебречь.
Ответ: Jx = 9ml2.
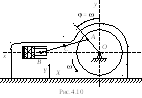
Задача 4.5. Ротор бурового вибратора (рис.4.6) с дебалансом в виде сплошного полуцилиндра радиусом R и массой m1 равномерно вращается с угловой скоростью . Станина вибратора с буровым снарядом общей массой m2 колеблется вместе с вибратором. Пренебрегая массой ротора, определить максимальное усилие Nmax, передающееся на забой скважины при работе вибратора.
Ответ:
![]()
![]()
![]() ,
где Q1 – вес дебаланса;
Q2 – вес станины с буровым
снарядом; Qв – возмущающая
сила; xC – расстояние
от оси вращения дебаланса до его центра
тяжести.
,
где Q1 – вес дебаланса;
Q2 – вес станины с буровым
снарядом; Qв – возмущающая
сила; xC – расстояние
от оси вращения дебаланса до его центра
тяжести.

Ответ:
![]() .
.


Ответ: xC=0;
![]() .
.
Задача 4.8. Цилиндрическая бурильная труба, сечение которой изображено на рис.4.9, имеет массу m. Ее внешний диаметр 2R, внутренний 2r. Вычислить момент инерции трубы, относительно оси z, если труба представляет собой однородное сплошное тело, а ось z перпендикулярна сечению трубы.
Ответ:
![]() .
.
![]() .
.
Ответ:
 ;
Y =
;
Y =
![]() .
.
Рис.4.11 адача 4.10.
При перегрузке рудной массы из погрузочной
машины в вагонетку (рис.4.11)
рукоять 3, несущая ковш 2 с грузом,
перекатывается без скольжения по
горизонтальной плоскости к
адача 4.10.
При перегрузке рудной массы из погрузочной
машины в вагонетку (рис.4.11)
рукоять 3, несущая ковш 2 с грузом,
перекатывается без скольжения по
горизонтальной плоскости к
![]() ,
общая масса системы m, масса рукояти
с ковшом и грузом m1. Определить
скорость u комплекса по окончании
пересыпания груза, если расстояние от
центра масс комплекса до плоскости
корпуса h.
,
общая масса системы m, масса рукояти
с ковшом и грузом m1. Определить
скорость u комплекса по окончании
пересыпания груза, если расстояние от
центра масс комплекса до плоскости
корпуса h.
Ответ:
![]() .
.