

1.3. Приведение произвольной системы сил к простейшему виду
Произвольная система сил может быть
приведена к двум величинам: главному
вектору
![]() ,
т.е. геометрической сумме сил системы,
и главному моменту относительно
некоторого центра
,
т.е. геометрической сумме сил системы,
и главному моменту относительно
некоторого центра
![]() ,
т.е. к геометрической сумме векторов
моментов всех сил, составляющих систему.
Последнее выражение может быть переписано
в виде
,
т.е. к геометрической сумме векторов
моментов всех сил, составляющих систему.
Последнее выражение может быть переписано
в виде
![]() ,
где
,
где
![]() – радиус-вектор i-й
силы
– радиус-вектор i-й
силы
![]() относительно
выбранного центра (точки О);
n – число сил в
системе.
относительно
выбранного центра (точки О);
n – число сил в
системе.
Модуль главного вектора
![]() ,
,
где
![]() – сумма проекций всех сил системы
соответственно на оси
– сумма проекций всех сил системы
соответственно на оси
![]()
![]()
![]()
![]()
![]() – проекции на оси координат i-й силы
системы.
– проекции на оси координат i-й силы
системы.
Модуль главного момента системы сил относительно некоторого центра
![]() ,
,
где
![]() – моменты всех сил системы относительно
соответствующей оси координат.
– моменты всех сил системы относительно
соответствующей оси координат.
Направления в пространстве главного
вектора
![]() и
главного момента
и
главного момента
![]() определяются их направляющими косинусами:
определяются их направляющими косинусами:
для главного вектора
![]() ;
;
![]() ;
;
![]() ;
;
для главного момента
![]() ;
;
![]() ;
;
![]()
при соблюдении условия
![]() .
.
Рассмотрим возможности приведения различных произвольных систем сил к простейшему виду:
если
![]() ,
система приводится к одной равнодействующей
силе, линия действия которой проходит
через центр приведения;
,
система приводится к одной равнодействующей
силе, линия действия которой проходит
через центр приведения;
если
![]() ,
система приводится к равнодействующей
паре, момент которой является свободным
вектором;
,
система приводится к равнодействующей
паре, момент которой является свободным
вектором;
если
![]()
![]() ,
эта система приводится к одной
равнодействующей силе, равной главному
вектору и приложенной в точке, отстоящей
от центра приведения на расстояние
,
эта система приводится к одной
равнодействующей силе, равной главному
вектору и приложенной в точке, отстоящей
от центра приведения на расстояние
![]() ;
;
 если
если
![]()
![]() ,
система приводится к силовому винту
(динаме), т.е. к совокупности силы и пары
сил, плоскость действия которой
перпендикулярна линии действия силы.
Если угол между
векторами
,
система приводится к силовому винту
(динаме), т.е. к совокупности силы и пары
сил, плоскость действия которой
перпендикулярна линии действия силы.
Если угол между
векторами
![]() и
и
![]() меньше
меньше
![]() ,
то силовой винт называется правым, при
,
то силовой винт называется правым, при
![]() – левым. При этом момент пары сил в
составе динамы равен
– левым. При этом момент пары сил в
составе динамы равен
![]() ;
;
![]() ,
силы системы взаимно уравновешены.
,
силы системы взаимно уравновешены.
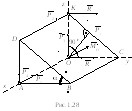
Пример 1.3. По ребрам призмы действуют силы Р1 = 40 Н, Р2 = Р5 = = 10 Н, Р3 = 15 Н, Р4 = 5 Н (рис.1.28). Кроме того, дано ОА = ОК = 20 см, = 30. Привести эту систему сил к простейшему виду.
Решение. Выберем систему координатных осей (рис.1.28) и найдем проекции главного вектора на координатные оси:
![]() ;
;
![]() ;
;
![]() .
.
Модуль главного вектора
![]() Следовательно, главный вектор направлен
по оси y и равен
Следовательно, главный вектор направлен
по оси y и равен
![]() Н.
Н.
Приводя данную систему сил к началу
координат, найдем проекции MОx,
MОy, MОz на оси
x, y, z главного момента
![]() относительно точки О.
относительно точки О.
Проекция на ось х
![]() .
Так как силы
.
Так как силы
![]() ,
,
![]() ,
,
![]() пересекают ось x, а сила
пересекают ось x, а сила
![]() параллельна этой оси, то моменты этих
сил относительно оси x равны нулю
и, следовательно,
параллельна этой оси, то моменты этих
сил относительно оси x равны нулю
и, следовательно,
![]() .
Сила
.
Сила
![]() лежит в плоскости zOy, причем
наблюдатель, смотрящий со стороны
положительного конца оси x, видит
силу
лежит в плоскости zOy, причем
наблюдатель, смотрящий со стороны
положительного конца оси x, видит
силу
![]() ,
действующую относительно точки О
по часовой стрелке, поэтому
,
действующую относительно точки О
по часовой стрелке, поэтому
![]() Нм.
Нм.
Проекция главного момента на ось y
![]() .
Силы
.
Силы
![]() ,
,
![]() ,
,
![]() пересекают ось y, поэтому их моменты
относительно этой оси
равны нулю. Следовательно,
пересекают ось y, поэтому их моменты
относительно этой оси
равны нулю. Следовательно,
![]() .
Так как силы
.
Так как силы
![]() и
и
![]() лежат в плоскости zx,
лежат в плоскости zx,
![]() Нм
и
Нм
и
![]() Нм.
Таким образом,
Нм.
Таким образом,
![]() .
.
Так как силы
![]() ,
,
![]() ,
,
![]() ,
,
![]() пересекают ось z, сила
пересекают ось z, сила
![]() параллельна этой оси, а потому момент
каждой из этих сил относительно оси z
равен нулю, то
параллельна этой оси, а потому момент
каждой из этих сил относительно оси z
равен нулю, то
![]() .
.
Итак, главный момент
![]() направлен вдоль оси x,
и модуль его
направлен вдоль оси x,
и модуль его
![]() Нм.
Нм.
Это означает, что данная система сил
эквивалентна силе
![]() приложенной в точке О, и паре сил с
моментом
приложенной в точке О, и паре сил с
моментом
![]() .
.
Остается теперь выяснить, к какому
простейшему виду можно привести данную
систему сил. Так как главный вектор
![]() перпендикулярен
перпендикулярен
![]() ,
то сила
,
то сила
![]() и пара сил (с моментом
и пара сил (с моментом
![]() )
лежат в одной плоскости zOy и
приводятся к одной равнодействующей
силе
)
лежат в одной плоскости zOy и
приводятся к одной равнодействующей
силе
![]() равной и параллельной силе
равной и параллельной силе
![]() и приложенной в точке К, отстоящей
от оси
и приложенной в точке К, отстоящей
от оси
![]() на расстояние
на расстояние
![]() м.
м.
Итак, данная система сил приводится к
равнодействующей силе
![]() приложенной к точке К и направленной
параллельно оси y, причем
приложенной к точке К и направленной
параллельно оси y, причем
![]() Н.
Н.

Ответ: а = 0; b = с.
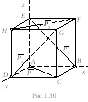
Задача 1.29. К четырем вершинам A, H, B и D куба приложены четыре равные по модулю силы: Р1 = Р2 = = Р3 = Р4 = Р, причем сила Р1 направлена по АС, Р2 – по HF, Р3 – по BE и Р4 – по DG (рис.1.30). Привести эту систему к простейшему виду.
Ответ: равнодействующая
![]()
![]() ,
приложенная в точке В под углом 45
к осям x и z.
,
приложенная в точке В под углом 45
к осям x и z.

Ответ:
![]()
![]()

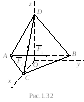 адача 1.31.
К правильному тетраэдру ABCD с ребрами,
равными а, приложена сила F1
по ребру АВ и сила F2 по
ребру CD (рис.1.32).
Найти координаты x и y точки
пересечения центральной винтовой оси
с плоскостью Оxy.
адача 1.31.
К правильному тетраэдру ABCD с ребрами,
равными а, приложена сила F1
по ребру АВ и сила F2 по
ребру CD (рис.1.32).
Найти координаты x и y точки
пересечения центральной винтовой оси
с плоскостью Оxy.
Ответ:

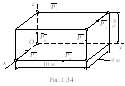
Задача 1.32. По ребрам куба, равным а, действуют двенадцать равных по модулю сил Р (рис.1.33). Привести эту систему сил к каноническому виду и определить координаты x и y точки пересечения центральной винтовой оси с плоскостью Оxy.
Ответ:
![]()
![]()
![]()
![]()
Ответ: F = 5,4 Н; MО = –47,3 Нм; cos = 0; cos = 0,37; cos = 0,93; x = –11,9 м; y = –10 м.