

5.2. Основное уравнение аналитической динамики
Движение материальных систем с идеальными связями подчиняется следующему основополагающему правилу: сумма элементарных работ всех действующих на систему активных сил, включая силы инерции, на возможных перемещениях равна нулю:
![]()
где
![]() – элементарная работа силы инерции i-й
точки
– элементарная работа силы инерции i-й
точки
![]() ;
;
![]() – масса точки;
– масса точки;
![]() – вектор ускорения.
– вектор ускорения.
Существенно, что выполнение этого общего уравнения аналитической динамики необходимо и достаточно для полного описания движения системы.
Напомним, что момент сил инерции тела, вращающегося вокруг неподвижной оси, М(J) = I, где I – момент инерции относительно оси; – угловое ускорение; знаки минус и плюс соответствуют ускоренному и замедленному вращению.
Решение. Вследствие
нерастяжимости нити модуль ускорения
тел w одинаков. Угловое
ускорение блока = /r.
Аналогично возможный поворот блока
![]() ,
где s
– перемещение системы; Р1 –
вес первого тела,
,
где s
– перемещение системы; Р1 –
вес первого тела,
![]() .
Поэтому основное уравнение динамики
имеет вид
.
Поэтому основное уравнение динамики
имеет вид
![]() .
.
Сократим это уравнение на s, решим его относительно w:
![]() .
.
Натяжение нити в сечении ab
![]() .
.
![]()
![]()
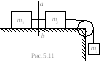
![]() соединены нерастяжимой нитью, переброшенной
через неподвижный блок (рис.5.11).
Первый груз движется по вертикали, а
два других – по горизонтальной гладкой
поверхности. Определить ускорение
системы и силу натяжения в сечении ab.
Массами нити и блока пренебречь.
соединены нерастяжимой нитью, переброшенной
через неподвижный блок (рис.5.11).
Первый груз движется по вертикали, а
два других – по горизонтальной гладкой
поверхности. Определить ускорение
системы и силу натяжения в сечении ab.
Массами нити и блока пренебречь.

![]()
![]() .
.
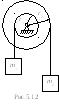
Задача 5.10. Два груза с массами
![]() и
и
![]() подвешены на невесомых нерастяжимых
нитях, которые навернуты на внутренний
и внешний радиусы бицилиндра, вращающегося
вокруг неподвижной оси (рис.5.12).
Определить угловое ускорение бицилиндра.
подвешены на невесомых нерастяжимых
нитях, которые навернуты на внутренний
и внешний радиусы бицилиндра, вращающегося
вокруг неподвижной оси (рис.5.12).
Определить угловое ускорение бицилиндра.
Ответ:
![]() .
.
Задача 5.11. К системе блоков
(рис.5.13) подвешены два
груза (![]() = 10 кг,
= 10 кг,
![]() = 8 кг).
Пренебрегая массами блоков, определить
ускорение второго груза и натяжение
нити.
= 8 кг).
Пренебрегая массами блоков, определить
ускорение второго груза и натяжение
нити.
Ответ: w2 = 2,8 м/с2; Т = 56,1 Н.
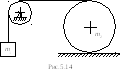
![]() приводит в движение каток массы
приводит в движение каток массы
![]() при помощи невесомой нерастяжимой нити
(рис.5.14). Пренебрегая
массой блока, определить ускорение
груза. Каток катится без проскальзывания
и представляет собой однородный диск.
при помощи невесомой нерастяжимой нити
(рис.5.14). Пренебрегая
массой блока, определить ускорение
груза. Каток катится без проскальзывания
и представляет собой однородный диск.
Ответ:
![]()
5.3. Уравнения Лагранжа 2-го рода
Для составления уравнений Лагранжа необходимо следующее:
1) правильно выбрать обобщенные координаты q1, q2, …, qn, которые должны быть взаимно независимы и полностью определять положение системы в пространстве;
2) определить
обобщенные силы Q1, Q2, …, Qn,
по всем обобщенным координатам. Если
действующие активные силы носят
потенциальный характер, то
![]()
![]() ,
где
,
где
![]() – потенциальная энергия системы;
– потенциальная энергия системы;
3) представить
кинетическую энергию системы как функцию
обобщенных координат
и скоростей
![]() ;
;
4) осуществить операции частного и полного дифференцирования в соответствии с видом уравнений Лагранжа
![]() n (
n (![]() ).
).
Таким образом, движение системы с n обобщенными координатами полностью описывается n уравнениями Лагранжа. Они образуют систему n дифференциальных уравнений второго порядка с n неизвестными.
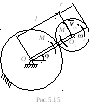
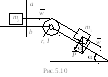
![]() насажена на кривошип, который вращается
вокруг оси неподвижной шестеренки под
действием движущего момента
насажена на кривошип, который вращается
вокруг оси неподвижной шестеренки под
действием движущего момента
![]() (рис.5.15). Кривошип –
однородный стержень длиной
(рис.5.15). Кривошип –
однородный стержень длиной
![]() и массой
и массой
![]() Бегающая шестеренка – однородный диск
массой
Бегающая шестеренка – однородный диск
массой
![]() ,
который перекатывается по неподвижной
шестеренке без проскальзывания. Следует
учесть момент сопротивления
,
который перекатывается по неподвижной
шестеренке без проскальзывания. Следует
учесть момент сопротивления
![]() ее перекатыванию. Составить уравнения
Лагранжа.
ее перекатыванию. Составить уравнения
Лагранжа.
Решение. Система имеет одну
степень свободы и одну обобщенную
координату –
угловое отклонение кривошипа от
горизонтали. Момент инерции кривошипа
относительно оси его вращения
![]() ,
а центральный момент инерции
,
а центральный момент инерции
![]() .
Кинетическая энергия кривошипа
.
Кинетическая энергия кривошипа
![]() .
.
Бегающая шестеренка находится в режиме
чистого качения, причем мгновенный
центр скоростей расположен в точке
касания Р. Поэтому ее угловая скорость
![]() где
где
![]() – скорость точки
– скорость точки
![]() ,
по модулю
,
по модулю
![]() Следовательно, кинетическая энергия
этой шестеренки
Следовательно, кинетическая энергия
этой шестеренки
![]() ,
причем, согласно теореме Штейнера,
момент инерции относительно мгновенной
оси вращения
,
причем, согласно теореме Штейнера,
момент инерции относительно мгновенной
оси вращения
![]() .
.
После подстановки получим
![]() .
.
Общая кинетическая энергия
![]()
Сообщим кривошипу возможный поворот
![]() .
Возможные повороты связаны между собой
точно так же, как соответствующие угловые
скорости. Поэтому возможный поворот
бегающей шестеренки
.
Возможные повороты связаны между собой
точно так же, как соответствующие угловые
скорости. Поэтому возможный поворот
бегающей шестеренки
![]() .
Элементарная работа активных сил
.
Элементарная работа активных сил
![]() .
.
Таким образом, обобщенная сила
![]() .
.
Единственное уравнение Лагранжа имеет вид
![]() .
.
Учтем, что
![]() ;
;
![]() ;
;
![]() ,
,
поэтому окончательно получим
![]() .
.
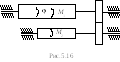
Задача 5.13.
Передача вращения между двумя валами
осуществляется двумя зубчатыми колесами,
имеющими соответственно z1
и z2 зубцов
(рис.5.16). Моменты инерции
валов вместе с колесами
![]() и
и
![]() .
На ведущий вал действует вращающий
момент
.
На ведущий вал действует вращающий
момент
![]() а на ведомый – момент сопротивления
а на ведомый – момент сопротивления
![]() .
Составить уравнение вращения ведущего
вала.
.
Составить уравнение вращения ведущего
вала.
Ответ:
![]() ,
где i = z1 / z2.
,
где i = z1 / z2.
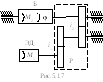
![]() ),
барабана (
),
барабана (![]() )
и промежуточного вала редуктора (
)
и промежуточного вала редуктора (![]() ),
а также передаточные числа ступеней
редуктора (
),
а также передаточные числа ступеней
редуктора (![]() и
и
![]() ).
К электродвигателю приложен вращающий
момент
).
К электродвигателю приложен вращающий
момент
![]() а к барабану – момент сопротивления
а к барабану – момент сопротивления
![]() Составить уравнение вращения барабана.
Составить уравнение вращения барабана.
Ответ:
![]()

Ответ:
![]()
Задача 5.16. Составить уравнение
движения математического маятника
массы
![]() ,
длина которого меняется по заданному
закону
,
длина которого меняется по заданному
закону
![]() .
.
Ответ:
![]() ,
где – угол отклонения
нити от вертикали.
,
где – угол отклонения
нити от вертикали.


 адача 5.17.
Точка подвеса маятника движется по
горизонтальной прямой по заданному
закону
адача 5.17.
Точка подвеса маятника движется по
горизонтальной прямой по заданному
закону
![]() (рис.5.19). Составить
уравнение движения маятника.
(рис.5.19). Составить
уравнение движения маятника.
Ответ:
![]() .
.
Задача 5.18. Призма
![]() массой
массой
![]() скользит по гладкой боковой грани призмы
скользит по гладкой боковой грани призмы
![]() массой
массой
![]() ,
образующей угол
,
образующей угол
![]() с горизонтом
(рис.5.20).
Определить ускорение призмы B.
Силами трения пренебречь.
с горизонтом
(рис.5.20).
Определить ускорение призмы B.
Силами трения пренебречь.
Ответ:
![]() .
.
Задача 5.19. Составить уравнение
движения однородного прямолинейного
стержня длиной
![]() который своим левым концом
опирается о гладкую вертикальную
стену, а в промежуточной
точке на неподвижный гвоздь О,
отстоящий от стенки на расстояние
а (рис.5.21). Угол
задан.
который своим левым концом
опирается о гладкую вертикальную
стену, а в промежуточной
точке на неподвижный гвоздь О,
отстоящий от стенки на расстояние
а (рис.5.21). Угол
задан.
Ответ:
![]()
![]() .
.

![]() и
и
![]() от их равновесных положений.
от их равновесных положений.
Ответ:
![]() ;
;
![]() ,
где с1, с2 и с3
– жесткость пружин.
,
где с1, с2 и с3
– жесткость пружин.

![]() катится вдоль горизонтальной поверхности
(рис.5.23). К корпусу тележки
шарнирно присоединен физический маятник.
Масса маятника
катится вдоль горизонтальной поверхности
(рис.5.23). К корпусу тележки
шарнирно присоединен физический маятник.
Масса маятника
![]() эксцентриситет
эксцентриситет
![]() момент инерции относительно оси вращения
момент инерции относительно оси вращения
![]() Составить уравнение вращения. В качестве
обобщенных координат принять абсолютное
перемещение корпуса х и угловое
отклонение эксцентриситета от вертикали
.
Составить уравнение вращения. В качестве
обобщенных координат принять абсолютное
перемещение корпуса х и угловое
отклонение эксцентриситета от вертикали
.
Ответ:
![]() ;
;
![]()
![]()