

2.2. Скорость и ускорение точки
Основными кинематическими характеристиками движения точки являются скорость и ускорение.
Скорость точки характеризует быстроту изменения положения точки. Вектор скорости точки выражается производной от радиуса-вектора r , определяющего ее положение, по времени:
![]() .
.
Проекции скорости на оси декартовых координат равны производным соответствующих координат по времени:
![]() ;
;
![]() ;
;
![]() .
.
Модуль скорости
![]() .
.
Направление вектора скорости определяется направляющими косинусами
![]() ;
;
![]() ;
;
![]() .
.
Если уравнение задано в естественной форме, то скорость точки
![]() ,
,
где
![]() – орт касательной, направленный в
сторону увеличения дуговой координаты
s; v
– алгебраическая величина скорости,
– орт касательной, направленный в
сторону увеличения дуговой координаты
s; v
– алгебраическая величина скорости,
![]() .
.
Ускорение характеризует изменение скорости с течением времени по модулю и направлению. Ускорение точки выражается производной от скорости по времени или второй производной от радиуса-вектора точки по времени
![]() .
.
Проекции ускорения на оси неподвижной декартовой системы координат следующие:
![]() .
.
Модуль ускорения
![]() .
.
Направление вектора ускорения определяется направляющими косинусами (аналогично направлению вектора скорости).
В случае, когда движение описывается
естественным способом, ускорение
определяется через проекции на
естественные оси координат. Ограничиваясь
плоским случаем, в дополнение к только
что введенному орту касательной
![]() введем орт главной нормали
введем орт главной нормали
![]() ,
направленный в сторону вогнутости
траектории. При переходе от одной точки
траектории к другой естественные оси,
оставаясь между собой ортогональными,
непрерывно поворачиваются.
,
направленный в сторону вогнутости
траектории. При переходе от одной точки
траектории к другой естественные оси,
оставаясь между собой ортогональными,
непрерывно поворачиваются.
Ускорение точки определяется как векторная сумма касательного и нормального ускорений точки:
![]() .
.
Касательное
ускорение характеризует изменение
скорости по величине (по модулю):
![]() .
Оно равно нулю, когда величина скорости
при движении остается неизменной.
.
Оно равно нулю, когда величина скорости
при движении остается неизменной.
Нормальное ускорение описывает изменение скорости по направлению:
![]() ,
,
где – радиус кривизны траектории.
При прямолинейном движении точки wn = 0, так как радиус кривизны прямой равен бесконечности.
Модуль полного ускорения
![]() .
.
Пример 2.2. Линейка эллипсографа АВ = l скользит концом А по оси абсцисс и концом В по оси ординат (рис.2.6). Линейка приводится в движение кривошипом ОС = 0,5l, шарнирно прикрепленным к ее середине. Расстояния АМ = а и ВМ = b известны. Угол между осью абсцисс и кривошипом изменяется пропорционально времени: = kt.
Найти уравнение движения точки М эллипсографа и уравнение ее траектории. Определить радиус кривизны траектории точки М, ее скорость, касательное, нормальное и полное ускорения при произвольном положении механизма и, в частности, в моменты времени t1 = 0 и t2 = /(2k).
Решение. Для составления уравнений движения точки М спроектируем отрезки ВМ и АМ на оси абсцисс и ординат соответственно. Треугольник ОАС равнобедренный: ОС = АС = 0,5l. Следовательно, СОА = САО = = kt. Тогда координаты точки М следующие:
x = BM cos = b cos kt;
y = AM sin = a sin kt.
Этими равенствами определяется закон движения точки М.
Для определения траектории представим уравнение движения точки в виде
![]()
возведем эти равенства в квадрат и сложим их:
![]()

Для определения скорости точки М вычислим первые производные от координат по времени, равные проекциям скорости точки на соответствующие оси координат:
![]()
Тогда скорость точки М
![]()
Проекции ускорения на оси координат находим, вычисляя первые производные по времени от проекций скоростей или вторые производные по времени от координат точки:
![]()
или, с учетом уравнений движения точки,
![]()
Модуль полного ускорения
![]()
Следовательно, ускорение точки М направлено по радиусу-вектору, проведенному из точки М в точку О, и по величине прямо пропорционально расстоянию точки М от начала координат. Проекция ускорения на касательную определяется как производная от проекции скорости на касательную по времени:
![]() .
.
Но так как
![]() ,
то модуль нормального ускорения
,
то модуль нормального ускорения
![]() .
.
Зная модули нормального ускорения точки и скорости, получим радиус кривизны траектории
 .
.
Теперь можем вычислить основные кинематические величины для моментов времени t1 = 0 и t2 = /2k:
|
Параметр |
x |
y |
v |
w |
w |
wn |
|
|
t1 |
b |
0 |
ak |
–bk2 |
0 |
k2b |
a2/b |
|
t2 |
0 |
a |
–bk |
–ak2 |
0 |
k2a |
b2/a |
Ответ:
![]()
![]()
![]()
![]()
![]()
![]()
 ;
;
![]() ;
;
 ;
;
 .
.
Значения параметров движения в моменты времени 1 = 0 и 2 = следующие:
|
Параметр |
x |
y |
v |
w |
w |
wn |
|
|
1 |
r |
–l |
|
|
|
|
|
|
2 |
–r + l |
0 |
|
|
0 |
|
|

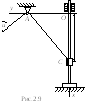
Задача 2.7. Груз С (рис.2.9) поднимается по вертикальной направляющей при помощи троса, перекинутого через неподвижный блок А, отстоящий от направляющей на расстояние АО = а. Вычислить скорость и ускорение груза С в зависимости от расстояния ОС = х, если свободный конец троса тянут с постоянной скоростью u.
Ответ:
![]() ;
;
![]() .
.
Задача 2.8. Даны уравнения движения точки: x = 4 + 6t2, y = 3t2 – 1 (x и y – в метрах, t – в секундах). Определить траекторию, скорость и ускорение точки.
Ответ:
![]() ;
;
![]() м/с;
м/с;
![]() м/с2.
м/с2.
Задача 2.9. Движение точки задано уравнениями x = 2t; y = e–4t sin4t. Записать уравнение траектории; найти моменты времени, в которые вектор скорости точки параллелен оси Ох, и моменты времени, в которые вектор скорости точки пересекает ось Ох.
Ответ: y = e–2x sin2x(0 x < );
![]() ,
,
![]() ;
;
![]() ,
,
![]() .
.
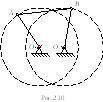
Задача 2.10. По уравнениям движения
точки x = t2 / 2 и
y = t3 / 3 (x и
y – в метрах, t – в секундах)
определить моменты времени, в которые
угол между векторами скорости и ускорения
точки
![]() .
.
Ответ: t1 = 1 c, t2 = 0,5 c.
Ответ: 1) v1 = 4,5 м/c; 2) v2 = 6,28 м/c; 3) v3 = 8,8 м/c.