

5. Аналитическая динамика
5.1. Принцип возможных перемещений
Для решения задач о равновесии материальной системы с идеальными связями используется принцип возможных перемещений (ПВП), согласно которому для равновесия необходимо и достаточно, чтобы сумма элементарных работ всех действующих на систему активных сил обращалась в нуль.
Возможными называются бесконечно малые перемещения точек системы, которые допускаются наложенными на систему связями. Эти перемещения с точностью до малых высшего порядка допустимо считать прямолинейными. Общее число взаимно независимых возможных перемещений называется числом степеней свободы.
Наложенные на систему связи называются идеальными, если их реакции в процессе возможных перемещений работу не производят. Таким образом, согласно ПВП, имеем
![]()
где
![]() – элементарная работа активных сил,
приложенных к i-й точке
системы, на одном из возможных перемещений.
– элементарная работа активных сил,
приложенных к i-й точке
системы, на одном из возможных перемещений.
Если система имеет
![]() степеней свободы, то составляется
степеней свободы, то составляется
![]() таких уравнений, причем каждое из них
соответствует возможному изменению
только одной из этих степеней.
таких уравнений, причем каждое из них
соответствует возможному изменению
только одной из этих степеней.
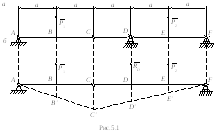
Пример 5.1.
Имеется четырехшарнирная балка
(рис.5.1, а),
на которую действуют активные силы
![]() и
и
![]() .
Определить реакцию скользящей шарнирной
опоры
.
Определить реакцию скользящей шарнирной
опоры
![]() .
.
Решение. Это статически определимая
система, которая непосредственно
возможных перемещений не имеет. Мысленно
отбросим опору
![]() ,
заменив ее действие реакцией
,
заменив ее действие реакцией
![]() .
В результате эта реакция переводится
в разряд активных сил, а система
превращается в механизм с одной степенью
свободы. Сообщим этому механизму
возможное перемещение. Его положение
после одного из таких перемещений
характеризуется ломаной
.
В результате эта реакция переводится
в разряд активных сил, а система
превращается в механизм с одной степенью
свободы. Сообщим этому механизму
возможное перемещение. Его положение
после одного из таких перемещений
характеризуется ломаной
![]() (рис.5.1, б).
Основное уравнение ПВП в данном случае
имеет вид
(рис.5.1, б).
Основное уравнение ПВП в данном случае
имеет вид
![]() .
.
Из геометрии перемещения видно, что
![]()
![]()
![]() После подстановки получим
После подстановки получим
![]()
Сократим последнее выражение на
![]() и разрешим его относительно RD.
Тогда
и разрешим его относительно RD.
Тогда
![]()
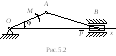
![]() ,
действующей на ползун. Положить, что
ОА = АВ = l,
а угол считать
заданным.
,
действующей на ползун. Положить, что
ОА = АВ = l,
а угол считать
заданным.
Ответ: М = 2Plsin.




![]() Определить модуль этой силы, если угол
при вершине А ромба равен 2.
Определить модуль этой силы, если угол
при вершине А ромба равен 2.
Ответ:
![]()
Задача 5.3. Определить условия
равновесия плоской стержневой системы
(рис.5.4) под действием
активных сил
![]() и
и
![]() .
.
Ответ:
![]()
Задача 5.4. В кулисном механизме ползун А перемещается вдоль рычага ОС и приводит в движение стержень АВ, движущийся в вертикальном направлении (рис.5.5). Найти силу Q, которая уравновешивает вертикальную силу Р.
Ответ:
![]() .
.
Задача 5.5. Полиспаст состоит из неподвижного блока А и двух подвижных блоков (рис.5.6). Он поднимает груз весом Q; к концу каната приложена сила Р. Определить условие равновесия.
Ответ:
![]() .
.

Ответ:
![]()
Задача 5.7. Составная балка состоит из трех балок, соединенных в шарнирах В и D (рис.5.8). Определить реактивную силу R и момент M в заделке.
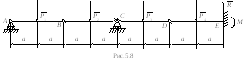
 твет:
твет:
![]() ;
;
![]() .
.
![]() и
и
![]() .
Определить вертикальную составляющую
реакции в заделке R.
.
Определить вертикальную составляющую
реакции в заделке R.
Ответ:
![]() .
.