

ТРАНСВУЗ-2015.Часть 2
.pdfРемонт и динамика подвижного состава
2. экономический эквивалент от неблагоприятных событий на железнодорожном транспорте.
Для повышения безопасности и эффективности функционирования объектов инфраструктуры ОАО «РЖД» должны предусматриваться специальные программы по снижению рисков с определенными затратами, зависящими от величин рисков.
При проведении анализа функциональной безопасности объектов инфраструктуры и подвижного состава следует рассматривать как общепринятые сценарии (оптимистические, инерционные и пессимистические), так и следующие сценарии:
–функционирование объекта в нормальных условиях;
–функционирование объекта с допустимыми отклонениями от нормальных условий с возвратом к исходному состоянию;
–функционирование объекта с отклонениями от нормальных условий, вызванными неблагоприятными событиями и требующими специальных мероприятий для возвращения к исходному состоянию;
–функционирование объекта с отклонениями от нормальных условий, вызванными «запроектными ситуациями», когда требуется пересмотр принятых решений, остановка реализации мероприятий или процессов, с переходом к новому состоянию с заданным уровнем уязвимости (устойчивости к воздействию неблагоприятных событий);
–функционирование объекта в гипотетических условиях с неблагоприятными событиями, развивающимися по самым наихудшим (тяжелым) вариантам реализации с непредвиденными факторами их инициирования, не позволяющими реализовывать мероприятия или процессы, связанные с функционированием объекта.
В соответствии с Федеральным законодательством, объекты железнодорожной инфраструктуры по уровню рисков, технической сложности, потенциальной опасности и функциональной значимости условно подразделяются на следующие категории:
–объекты технического регулирования;
–опасные производственные объекты;
–критически важные объекты.
Во всех случаях анализа рисков для каждой из названных категорий
180

ТРАНСВУЗ – 2015
объектов следует исходить из трехкомпонентной системы их взаимодействия с факторами внешней среды:
–социальный фактор (взаимодействие с человеком);
–техногенный фактор (взаимодействие с производственным процессом);
–природный фактор (взаимодействие с окружающей средой).
Общий порядок анализа рисков для объектов железнодорожной инфраструктуры и подвижного состава предполагает последовательный анализ опасностей, которым подвергается рассматриваемый объект, анализ уязвимостей объекта по отношению к выявленным опасностям и анализ ущербов от проявлений опасностей, реализующихся в тех случаях, когда объект оказался уязвимым [4]:
AR AН AV AU . |
(1) |
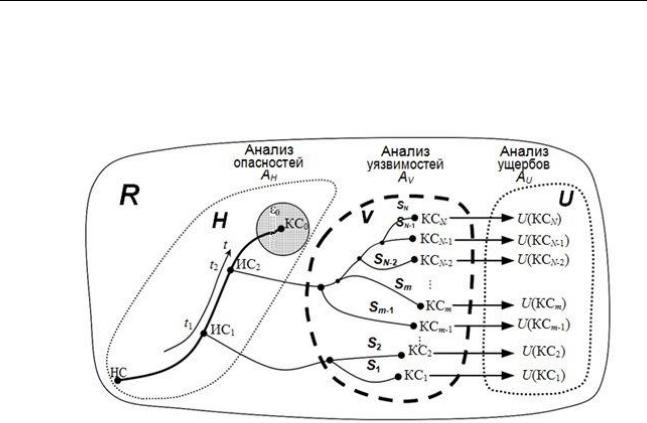
На рис. 2 показана структурная схема анализа риска |
объекта |
железнодорожной инфраструктуры, где используются следующие обозначения: НС – начальное состояние объекта (системы); КС0 – желаемое конечное состояние объекта (конечное состояние при
успешном выполнении объектом своих функций); ε0 – окрестность точки КС0, в которой конечные состояния можно считать
допустимыми (безопасными); ИС1, ИС2 – инициирующие опасные события;
Si (i = 1, 2, …, N) – i-й сценарий отказа, реализующийся после достижения одного из предельных состояний;
КСi (i = 1, 2, …, N) – недопустимое (опасное) конечное состояние объекта (системы), соответствующее сценарию Si;
U(КСi) (i = 1, 2, …, N) – ущерб, соответствующий конечному состоянию
КСi.
Под опасностями для объекта железнодорожной инфраструктуры и подвижного состава понимаются эксплуатационные нагрузки, отказы элементов, внешние экстремальные (проектные и запроектные) воздействия, ошибки операторов, несанкционированные воздействия. В зависимости от уровня неопределенности и возможных механизмов достижения предельных состояний элементов, опасности, действующие на объект, рассматриваются [5]:
– как случайные величины, характеризующиеся вероятностью реализации опасного события определенной интенсивности;
181
Ремонт и динамика подвижного состава
–как вероятностные распределения, определяющие плотность распределение вероятности реализации опасных событий по интенсивности;
–как случайные процессы, позволяющие описывать историю нагрузок и экстремальные воздействия на объект.
Рис. 2. Структура анализа риска и защищенности объекта
Уязвимость объекта характеризуется совокупностью сценариев случайных событий (отказов) и причинно-следственных связей между этими событиями, то есть структурой сценарного графа системы [6]. Анализ уязвимостей предполагает исследование последовательностей событий и причинноследственных связей между событиями, происходящими вслед за инициирующим событием вплоть до достижения объектом конечных состояний. Таким образом, анализ уязвимости предполагает детальное изучение дерева сценариев рассматриваемого объекта.
Реализация определенного сценария Si приводит к достижению объектом соответствующего недопустимого конечного состояния КСi, сопряженного с ущербом U(КСi ). Таким образом, ущерб – это результат изменения состояния объекта (системы), выражающийся одной или несколькими из следующих категорий:
–полная или частичная потеря здоровья либо смерть человека;
–нарушение целостности объекта или ухудшение других его свойств;
–фактические или возможные экономические, либо социальные потери, возникающие в результате каких-либо событий, явлений, действий;
182

ТРАНСВУЗ – 2015
– утрата имущества или других материальных, культурных, исторических или природных ценностей.
Проведя последовательно оценку опасностей, уязвимостей и ущербов для объекта железнодорожной инфраструктуры или подвижного состава, можно далее оценить уровень риска для рассматриваемого объекта:
R H r V U r . |
(2) |
где Нr = P[ИС1]; P[ИC2]; K; P[ИСK]} – |
вектор опасностей, компонентами |
которого являются вероятности реализации инициирующих событий ИС1, ИС2,…, ИСк;
V = [P(КСi | ИСj)] – N×K матрица уязвимости, компоненты которой представляют собой вероятности реализации возможных поврежденных состояний КСi при условии оказания на объекта, различных экстремальных воздействий ИСj;
Ur = U(КС1); U(КC2); K; U(КСN)} – вектор ущербов, компонентами которого являются величины ущербов, соответствующих конечным состояниям КС1, КC2, …, КСN.
Список литературы
1.Методические рекомендации по оценке рисков на железнодорожной инфраструктуре ОАО «РЖД» [Текст]. – Утв. 21.11.2011 – 109 с.
2.ГОСТ Р ИСО/МЭК 31010 – 2011. Менеджмент риска: методы оценки риска [Текст]. – Введен впервые, утв. 01.12.2011. – М.: Стандартинформ,
2012. – 70 с.
3.М ОКТ 2.02.002. Методика по качеству ОЖД – филиала ОАО «РЖД»
//Риск-менеджмент. Метод «3-х карт» [Текст]. – Введен 01.02.2013, утв. 29.12.2012; 1 редакция. – 17 с.
4.Махутов, Н. А. Анализ рисков и управление безопасностью (методические рекомендации) [Текст] / Н. А. Махутов, В. П. Петров, Р. С. Ахметханов, Д. О. Резников и др. – М.: МГФ «Знание», 2008. – 225 c.
5.Махутов, Н. А. Идентификация определяющих параметров угроз, уязвимости и защищенности критически важных объектов по отношению к превалирующим угрозам природного, техногенного и террористического
183

Ремонт и динамика подвижного состава
характера / Н. А. Махутов, В. П. Петров, Д.О. Резников, В. И. Куксова // Проблемы безопасности и чрезвычайных ситуаций [Текст]. – М.: ВИНИТИ,
2008, № 2. – с. 70-77.
6.Махутов Н. А., Резников Д. О. Оценка уязвимости технических систем
иее место в процедуре анализа риска // Проблемы анализа риска [Текст]. – Том 5. – М.: Институт машиноведения РАН, 2008, № 3. – с. 76-89.
УДК 629.423:629.4.016.1
А. А. Бакланов, С. Б. Ахмадеев, А. Г. Звягинцев
РЕЗУЛЬТАТЫ ЭКСПЛУАТАЦИИ ЭЛЕКТРОВОЗОВ 2ЭС10: ДОСТИЖЕНИЯ И ПРОБЛЕМЫ
Рассмотрены особенности новых грузовых электровозов постоянного тока серии 2ЭС10 с асинхронными тяговыми двигателями 3-фазного переменного тока. Приведены их расчетные и эксплуатационные показатели работы и данные об отказах оборудования.
Грузовые электровозы постоянного тока серии 2ЭС10 с асинхронными тяговыми двигателями 3-фазного переменного тока начали поступать в локомотивное депо Белово Западно-Сибирской железной дороги с августа 2013 года. В настоящее время их численность здесь составляет 49 электровозов и они эксплуатируются наряду с электровозами 2ЭС6, ВЛ10У, оснащенными коллекторными тяговыми двигателями постоянного тока. Общий вид этих электровозов показан на рис. 1 – 3.
Основные параметры электровозов при движении в длительном режиме тяги с поездами расчетной массы на бесстыковом пути с подъемом крутизной 8 ‰ в приведены в табл. 1 – 2. Здесь приняты следующие обозначения: Uэ – номинальное напряжение на токоприемнике; nол – количество осей электровоза; mл – масса электровоза; Vmax – максимальная (конструкционная) скорость; Pэд∞ – номинальная электрическая мощность тяговых двигателей; Fк∞ – номинальная касательная сила тяги; V∞ – номинальная скорость; mс – масса состава; aэд – удельный расход электроэнергии.
184

ТРАНСВУЗ – 2015
Рис. 1. Грузовой электровоз постоянного тока 2ЭС10 с асинхронными тяговыми двигателями трехфазного переменного тока
Рис. 2. Грузовой электровоз постоянного тока 2ЭС6 с коллекторными тяговыми двигателями постоянного тока
185

Ремонт и динамика подвижного состава
Рис. 3. Грузовой электровоз постоянного тока ВЛ10У с коллекторными тяговыми двигателями постоянного тока
Таблица 1
Основные параметры электровозов при движении с грузовыми поездами расчетной массы в длительном режиме тяги
на бесстыковом пути с подъемом крутизной 8 ‰
Серия |
|
|
|
|
Параметры |
|
|
|
||
|
|
|
|
|
|
|
|
aэд, |
||
электро- |
Uэ, |
|
|
Vmax, |
Pэд∞, |
Fк∞, |
V∞, |
|
||
nол |
mл, т |
mс, т |
кВт∙ч |
|||||||
воза |
кВ |
км/ч |
кВт |
кН |
км/ч |
|||||
|
|
|
104 т∙км |
|||||||
2ЭС10 |
3 |
8 |
200 |
120 |
8400 |
538 |
55,0 |
5625 |
288,8 |
|
2ЭС6 |
3 |
8 |
200 |
120 |
6040 |
418 |
51,0 |
4355 |
289,1 |
|
ВЛ10У |
3 |
8 |
200 |
100 |
4600 |
314 |
51,2 |
3211 |
299,2 |
|
Таблица 2
Соотношения основных параметров электровозов при движении с грузовыми поездами расчетной массы в длительном режиме тяги на бесстыковом пути с подъемом крутизной 8 ‰
Серия |
|
|
|
|
Параметры |
|
|
|
||
электро- |
Uэ |
nол |
mл |
Vmax |
Pэд∞ |
Fк∞ |
V∞ |
mс |
aэд |
|
воза |
||||||||||
|
|
|
|
|
|
|
|
|
||
2ЭС10 |
1 |
1 |
1 |
1,0 |
1,391 |
1,287 |
1,078 |
1,292 |
0,999 |
|
2ЭС6 |
||||||||||
|
|
|
|
|
|
|
|
|
||
2ЭС10 |
1 |
1 |
1 |
1,2 |
1,826 |
1,713 |
1,074 |
1,752 |
0,965 |
|
ВЛ10У |
||||||||||
|
|
|
|
|
|
|
|
|
||
2ЭС6 |
1 |
1 |
1 |
1,2 |
1,313 |
1,331 |
0,996 |
1,356 |
0,966 |
|
ВЛ10У |
||||||||||
|
|
|
|
|
|
|
|
|
||
186

ТРАНСВУЗ – 2015
Анализ основных параметров электровозов при движении с грузовыми поездами расчетной массы в длительном режиме тяги на бесстыковом пути с подъемом крутизной 8 ‰, приведенных в табл. 1 – 2, показывает следующее.
Электровоз 2ЭС10 имеет большие мощность и силу тяги по сравнению с электровозом 2ЭС6 соответственно на 39,1 % и 28,7 %, а по сравнению с электровозом ВЛ10 соответственно на 82,6 % и 71,3 %. В результате электровозами 2ЭС10 на участках с лимитирующими подъемами крутизной 8 ‰ можно водить грузовые поезда большей массы на 29,2 % по сравнению с электровозами 2ЭС6 и на 75,2 % по сравнению с электровозами ВЛ10 при несколько меньшем удельном расходе электроэнергии на тягу.
Электровозы 2ЭС10 относятся к электровозам нового пятого поколения. Они оснащены бесколлекторными асинхронными тяговыми двигателями 3- фазного переменного тока и системой бесконтактного плавного регулирования частоты, напряжения и тока тяговых двигателей с целью регулирования силы тяги и скорости движения, при этом в силовой схеме тяговые двигатели всегда соединены параллельно (рис. 4) в отличие от электровозов 2ЭС6 и ВЛ10У, у которых каждая пара тяговых двигателей соединена последовательно даже на параллельном соединении двигателей.
ХА |
|
|
|
UZ1 |
UZ2 |
UZ3 |
UZ4 |
М1 |
М2 |
М3 |
М4 |
|
Рис. 4. Упрощенная схема силовых цепей тяговых двигателей одной секции электровоза 2ЭС10
В режиме тяги в каждой секции электровоза 2ЭС10 тяговые двигатели М1-М4 получают питание из контактной сети постоянного тока напряжением 3000 В через токоприемник ХА и далее от управляемых полупроводниковых
187

Ремонт и динамика подвижного состава
преобразователей UZ1-UZ4, работающих инверторами и преобразующих постоянное напряжение и ток контактной сети в 3-фазный переменный ток регулируемой частоты и амплитуды (рис. 4). При электрическом торможении управляемые полупроводниковые преобразователи работают выпрямителями, при этом в режиме рекуперативного торможения выпрямленное напряжение и ток передаются в контактную сеть, а в режиме реостатного торможения – на тормозные резисторы.
Асинхронные тяговые двигатели 3-фазного переменного тока имеют жесткие механические характеристики в режимах тяги и электрического торможения. Благодаря этому, а также параллельному соединению тяговых двигателей, плавному регулированию режимов их работы, более совершенной противобоксовочной защите, склонность колесных пар электровоза 2ЭС10 к боксованию в режиме тяги и юзу в режиме электрического торможения меньше, то есть тягово-сцепные свойства электровоза выше, меньше расход песка, износ бандажей колес и рельсов.
На электровозе 2ЭС10 применены более совершенные системы вспомогательных машин и способы их питания, а также более совершенная система рекуперативного торможения и в целом система управления электровозом. Все это вместе взятое дает возможность снизить расход электроэнергии на тягу, увеличить возврат энергии при рекуперативном торможении.
Преимущества электровозов 2ЭС10 в эксплуатации характеризуют данные табл. 3, в которой в качестве примера приведены показатели работы электровозов 2ЭС10 и ВЛ10У в локомотивном депо Белово за 12 месяцев 2014 года на участке Междуреченск-Белово.
Таблица 3
Эксплуатационные показатели работы электровозов на участке Междуреченск-Белово в 2014 году
|
Удельный |
Удельный |
Коэффициент |
Средняя |
|
|
расход |
возврат |
|||
Серия |
возврата |
масса |
|||
электроэнергии |
электроэнергии |
||||
электровоза |
электроэнергии |
поезда mс, |
|||
аэ, кВт·ч/104 |
аэр, кВт·ч/104 |
||||
|
ткм |
ткм |
βэр |
т |
|
|
|
|
|||
2ЭС10 |
59,1 |
17,8 |
0,231 |
5571 |
|
ВЛ10У |
60,1 |
15,0 |
0,200 |
4979 |
|
2ЭС10/ВЛ10У |
0,983 |
1,187 |
1,155 |
1,119 |
188

ТРАНСВУЗ – 2015
По данным табл. 3 видно, что электровозы 2ЭС10 по сравнению с ВЛ10У имеют на 1,7 % меньший расход электроэнергии, на 18,7 % больший возврат электроэнергии при рекуперативном торможении, на 15,5 % больший коэффициент возврата электроэнергии, на 11,9 % большую среднюю массу поезда. Такие показатели обусловлены тем, что на этом участке электровозы 2ЭС10 водят в основном тяжелые поезда.
Однако наряду с преимуществами электровозы 2ЭС10 имеют определенные недостатки. В течение эксплуатации электровозов 2ЭС10 с 2013 года по 2015 год в локомотивном депо Белово наблюдается большое количество отказов их оборудования. Так за 10 месяцев 2015 года произошло 240 случаев отказов оборудования, которые распределились следующим образом:
механическое оборудование – 30 %; электрическое оборудование – 67 %; тяговые электрические машины – 3 %.
Достаточно часто происходят отказы токоприемников, тяговых преобразователей, тормозных резисторов, микропроцессорных систем управления, систем подачи песка под колесные пары и др. Кроме того, в зимний период 2013-2014 гг. возникали неравномерный износ бандажей колес по кругу катания и сильные вибрации электровозов 2ЭС10. Перечисленные и другие отказы оборудования требуют повышения надежности и усовершенствования алгоритма работы микропроцессорных систем управления, устранения конструктивных недоработок узлов и деталей и других мероприятий по улучшению работы электровозов 2ЭС10.
189