

ТРАНСВУЗ-2015.Часть 2
.pdfРемонт и динамика подвижного состава
X (s) |
1 |
|
1 |
|
1 |
F (s) |
1 |
|
|
|
F (s); |
||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|||||||||||
|
|
|
|
|
s |
|
|
|
|
ин |
ms |
|
ин |
||||||||
|
m |
|
|
|
s |
|
|
|
|
|
|||||||||||
(s) |
|
1 |
|
1 |
|
1 |
ин (s) |
1 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
M |
|
|
|
Mин (s), |
|||||||||
|
|
|
s |
|
|
Js |
2 |
|
|||||||||||||
|
J |
|
|
|
|
|
s |
|
|
|
|
|
|
||||||||
(3)
(4)
где m и J – соответственно масса и момент инерции тела, а s2 в знаменателе характеризует операцию двойного интегрирования.
Множитель перед силой или моментом силы является передаточной функцией данного звена. Произведение в квадратных скобках означает последовательное соединение, следовательно, данное звено можно детализировать, как показано на рис. 1.
Fин |
Fин |
|
|
x |
|
|
x |
|
|
x x |
Mин |
Mин |
|
|
|
|
|
|
|
||||||||||||
1/m |
1/s |
1/s |
1/J |
1/s |
1/s |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
x |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
Рис. 1. Структурная схема связи линейной (а) и угловой (б) обобщенной координаты с силой или моментом силы инерции соответственно
Таким образом, внутри рассматриваемого звена присутствуют еще два промежуточных сигнала (ускорение и скорость), которые тоже характеризуют динамические процессы в системе и могут быть выведены как выходные сигналы системы для более детального анализа процессов в ней. Кроме того, данные сигналы могут быть использованы как входные сигналы звеньев, динамические свойства которых зависят от скорости либо ускорения соответствующего элемента, или дополнительных устройств, изначально не входящих в схему, но служащих для ее модификации с целью улучшения динамических свойств системы.
Другим видом сигналов являются силы и моменты сил, которые воздействую на элементы, и являются входными по отношению к ним. Так, непосредственно на входе звена присутствует сила инерции, которая определяется как алгебраическая сумма всех сил, действующих на рассматриваемое тело. В свою очередь, реакции связей являются их выходными сигналами и зависят от взаимного положения тел в системе, и, как следствие,
60
ТРАНСВУЗ – 2015
возникающих в них деформаций. То есть, в данном случае деформации связей считаются по отношению к ним входными сигналами, которые с учетом параметров конкретных связей преобразуются в силы реакций. Сами деформации выражаются через обобщенные координаты путем приведения их к точкам, в которых связи непосредственно присоединяются к твердым телам.
Сумматоры и устройства сравнения необходимы для выполнения операций алгебраического суммирования соразмерных групп сигналов (сил, моментов сил, а также линейных и угловых перемещений при определении деформаций связей в соответствии с заданными выражениями).
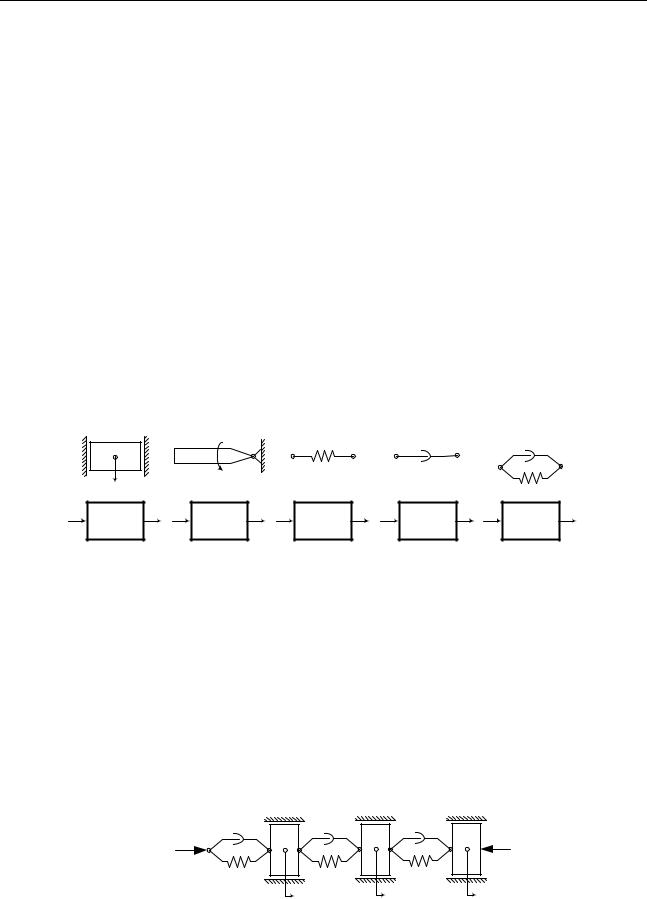
Следовательно, в качестве одномерного динамического звена могут рассматриваться твердые тела для каждой обобщенной координаты отдельно (как линейных, так и угловых), а также связи между этими телами (рассматриваются отдельно вдоль каждой из осей координат, на которые проектируется ось связи). В расчетной и структурной схемах указанные элементы системы обозначаются, как показано на рис. 2.
m |
c |
b |
b |
J |
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
1/(ms2) |
1/(Js2) |
c |
bs |
c + bs |
а |
б |
в |
г |
д |
Рис. 2. Обозначение твердого тела с линейной (а) и угловой (б) координатой и упругой (в), диссипативной (г) и упруго-диссипативной (д) связей в расчетной (верхний ряд) и структурной схемах
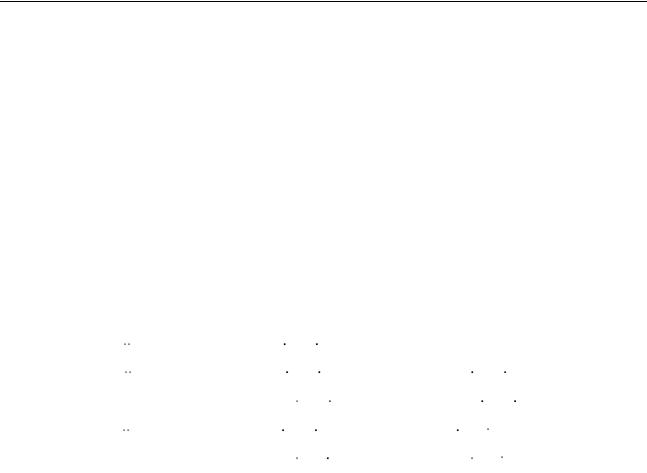
Теперь рассмотрим более сложную задачу: линейчатую схему с тремя степенями свободы, в которой на одно из тел не оказывается воздействие, а на остальные два воздействует силовое либо кинематическое возмущение. Расчетная схема такой системы изображена на рис. 3.
η(t) |
b1 |
m1 |
b2 |
m2 |
b3 |
m3 |
F(t) |
|
|
|
|||||
|
|
|
|
|
|
||
|
c1 |
|
c2 |
x2 |
c3 |
|
x3 |
|
|
x1 |
|
|
|
Рис. 3. Линейчатая расчетная схема системы с тремя степенями свободы
61
Ремонт и динамика подвижного состава
Подобная расчетная схема может быть использована, например, для расчета в первом приближении вертикальной динамики тепловоза. Здесь входными сигналами являются кинематическое воздействие η(t) (от геометрической неровности рельса) и сила F(t) (например, от дисбаланса дизель-генератора), выходными – обобщенные координаты x1(t), x2(t) и x3(t). С точки зрения теории динамических систем схема должна быть универсальной, т. е. преобразовываться относительно произвольного входного воздействия, приложенного к абсолютно любому из тел либо связи между телами.
Применяя любой известный метод аналитической механики, получим систему трех дифференциальных уравнений, каждое из уравнений которой необходимо выразить относительно силы инерции для соответствующего твердого тела:
m3 z3 c3 (z3 z2 ) b3 (z3 z2 ) F; |
|
|
|
|
|
|
|
|
|
|||||||||||||
m z |
2 |
c (z z |
) b (z z |
) c (z |
2 |
z ) b (z |
2 |
z ) |
|
|||||||||||||
|
2 |
|
3 |
3 |
2 |
|
3 |
|
3 |
2 |
|
2 |
|
|
1 |
2 |
|
1 |
|
|||
|
|
|
|
c3 (z2 z3 ) b3 (z2 z3 ) c2 (z2 |
z1) b2 (z2 z1); |
(5) |
||||||||||||||||
|
|
|
|
|||||||||||||||||||
m z c (z |
|
z ) b (z |
|
z ) c (z ) b (z ) |
|
|||||||||||||||||
|
1 |
1 |
2 |
2 |
1 |
|
2 |
|
2 |
1 |
|
1 |
1 |
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
c (z z |
) b (z z |
) c (z ) b (z ). |
|
|||||||||||||||
|
|
|
|
2 |
|
1 |
2 |
|
2 |
|
1 |
2 |
1 |
|
|
1 |
|
1 |
1 |
|
|
|
Очевидно, что сила инерции в каждом уравнении равна сумме всех остальных сил, которые можно разделить на две группы. В первую входят активные силы (в нашей задаче это сила F), которые как правило являются переменными и имеют полигармонический характер, поэтому их знак в уравнении не играет роли (его можно принять в зависимости от направления силы в начальный момент времени). Вторая группа сил – это реакции связей, в которые входят, в том числе, кинематические возмущения (здесь – η). Поскольку по третьему закону Ньютона реакция связи действует на оба соединяемых ей тела, то соответствующая сила входит в два уравнения, но с противоположным знаком в каждом из случаев. В целом все три уравнения имеют схожую структуру, поэтому для каждого из них i-й фрагмент структурной схемы будет иметь вид, приведенный на рис. 4, а. Если преобразовать схему, отделив выходную обобщенную координату выбранного i-го тела от входных, принятых для соседних тел, связанных с ним, то схема примет вид, показанный на рис. 4, б.
62

ТРАНСВУЗ – 2015
x |
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xi |
|
|
|
|
|
|
|
|
Wi(s) |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
Wi(s) |
|
|
|
|
|
|
1/(mis2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
xi 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
xi |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wi(s) |
|
+ |
|
|
|
|
|
1/(mis2) |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Wi+1(s) |
|
|
|
|
|
|
|
xi 1 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wi+1(s) |
|
|
|
|
|
|
|
|
Wi+1(s) |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xi 1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
||||||||||||
|
|
|
|
|
|
Рис. 4. Фрагмент структурной схемы для i-го твердого тела |
|
|
|
|||||||||||||||||||||||||||
На рис. 4 звено с передаточной функцией 1/(mis2) характеризует свойства рассматриваемого i-го тела, а Wi(s) и Wi+1(s) – передаточные функции соответственно предшествующей и последующей по отношению к данному телу связей. Кроме того, обе эти связи по отношению к рассматриваемому телу являются обратными отрицательными и функционируют параллельно:
Wi (s) bi s ci ; Wi 1(s) bi 1s ci 1; WОС i (s) Wi (s) Wi 1(s). |
(6) |
Кроме того, свойства рассматриваемого тела можно дополнить характеристиками его связей с другими телами, упростив схему (рис. 5, а):
|
|
|
|
|
|
|
|
|
|
|
Wm i (s) |
|
|
|
1 |
|
|
. |
|
|
|
|
(7) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
m s2 |
W |
(s) |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
ОС i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
xi 1 |
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
F |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
Wi(s) |
|
+ |
|
|
Wm i(s) |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
x3 |
||||||||||
xi 1 |
|
|
|
|
|
|
|
|
|
WI(s) |
|
WII(s) |
|
|
|
WIII(s) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
2 |
|
|
|
|
|||||||||||
Wi+1(s) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
||||
|
|
|
|
Рис. 5. Структурная схема системы с многомерными звеньями (б) |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
и структура этих звеньев (а) |
|
|
|
|
|
|
|
|
||||||||||||||
Если фрагмент схемы на рис. 5, а обозначить одним звеном (которое не будет одномерным, так как имеет два входа), то схема всей системы примет вид, показанный на рис. 5, б. Можно отметить следующие особенности: первое звено имеет в качестве основного входа кинематическое воздействие η(t); движение второго тела оказывает воздействие и на первое, и на третье; на
63

Ремонт и динамика подвижного состава
последнее тело оказывает влияние только одно из оставшихся тел (второе), но кроме этого дополнительным возмущением является активная сила F.
Список литературы
1.Бесекерский, В. А. Теория систем автоматического управления [Текст] / В. А. Бесекерский, Е. П. Попов. – СПб.: Профессия, 2004. – 752 с.
2.Смалев, А. Н. Моделирование динамики подвижного состава железных
дорог средствами Matlab Simulink [Текст] / А. Н. Смалев // Информационные и управляющие системы на транспорте и в промышленности: Матер. всерос. науч.-техн. конф. с междунар. уч. / Омский гос. ун-т путей сообщения. Омск,
2014. – С. 286 – 292.
УДК 629.1
В. К. Мехедов
ВЛИЯНИЕ ВЗАИМОДЕЙСТВИЯ В СИСТЕМЕ «КОЛЕСО – РЕЛЬС» НА ЭНЕРГОЗАТРАТЫ ДЛЯ ОСУЩЕСТВЛЕНИЯ ТЯГИ ПОЕЗДОВ
В статье приведена оценка влияния взаимодействия в системе «колесо -рельс» на энергозатраты для осуществления тяги поездов, влияние геометрических параметров колесных пар на сопротивление качению подвижного состава. Актуальность темы подтверждается исследованиями российских и зарубежных ученых, указывающими на то, что потери топливно-энергетических ресурсов на сопротивление качению в системе «колесо – рельс» могут составлять до 50% от затрат на тягу поездов.
Затраты на движение подвижного состава являются одной из самых значительных статей расходов в ОАО «РЖД». По данным финансовой отчетности ОАО «РЖД» за 2013-2014 годы, затраты на тягу поездов составляют 163,4 и 176,2 млрд. руб. соответственно. График затрат приведен на рис. 1.
64

ТРАНСВУЗ – 2015
Рис. 1. Затраты на тягу поездов
Потребляемый подвижным составом расход топливно-энергетических ресурсов можно представить как сумму затрат на движение поезда, собственные нужды локомотива, отопление и освещение пассажирских и почтово-багажных вагонов.
Расход топливно-энергетических ресурсов на движение поезда характеризуется силой сопротивления движению поезда, подразделяемой на основное и дополнительное сопротивление движению поезда и определяемой не только характеристиками локомотива и вагонов, но и состоянием пути и метеорологическими условиями.
Силы основного сопротивления движению обусловлены взаимодействием колесных пар с рельсовой колеей, трением в подшипниках подвижного состава и сопротивлением от воздействия воздушной среды при отсутствии ветра. Силы дополнительного сопротивления движению возникают от уклонов и кривизны пути, при трогании с места, от подвагонного генератора, при низких температурах наружного воздуха и действии встречного и бокового ветра. На расход энергии оказывает техническое состояние локомотива и состояние верхнего строения пути.
65

Ремонт и динамика подвижного состава
Проблемой снижения затрат на тягу поездов прямо или косвенно занимались многие ученые и практики в России и за рубежом. Анализ проведенных работ по данной тематике позволяет их систематизировать по следующим направлениям:
–организационные направления (совершенствование режимов управления движением поездов; совершенствование организации движения поездов по различным участкам железных дорог; снижение энергопотребления при простоях и проведении маневровых работ);
–конструктивные направления (рекуперативное торможение электровозов; внедрение систем учета и анализа работы тепловозов; исследование перспективных источников энергии; совершенствование конструкции подвижного состава и верхнего строения пути);
–технологические направления (совершенствование технологии ремонта подвижного состава; повышение твердости поверхностей контакта колеса и рельса; смазки (лубрикации) рельсовых путей).
Как видно из анализа, проблема энергозатрат на движение подвижного состава зависит от множества факторов различной природы, каждый из которых влияет на расход энергии по-разному. По мнению российских и зарубежных ученых наиболее острыми в данной проблеме остаются вопросы снижения энергозатрат на преодоление сопротивлению качения колесных пар по рельсовой колее. Потери топливно-энергетических ресурсов на сопротивление качению в системе «колесо – рельс», по мнению научного сообщества, составляют от 30 до 50% от затрат на тягу поездов.
Работы по исследованию взаимодействия системы «колесо-рельс» можно разделить на несколько основных типов:
–работы, касающиеся взаимодействия в системе гребень колеса – головка рельса, лубрикация, силы проскальзывания;
–работы по повышению твердости рельс и поверхностей катания колесных пар;
–работы по исследованию контактных взаимодействий в системе «колесо-рельс»;
–работы по исследованию динамического взаимодействия «колесорельс», разности диаметров бандажей, возникновения неровностей рельсового пути и дефектов поверхности катания колесных пар.
66
ТРАНСВУЗ – 2015
Несмотря на всесторонне изученный вопрос влияния взаимодействия системы «колесо-рельс» на энергозатраты при движении подвижного состава, по прежнему малоизученной и актуальной остается проблема влияния геометрических параметров на сопротивление качению колесных пар по рельсовой колее.
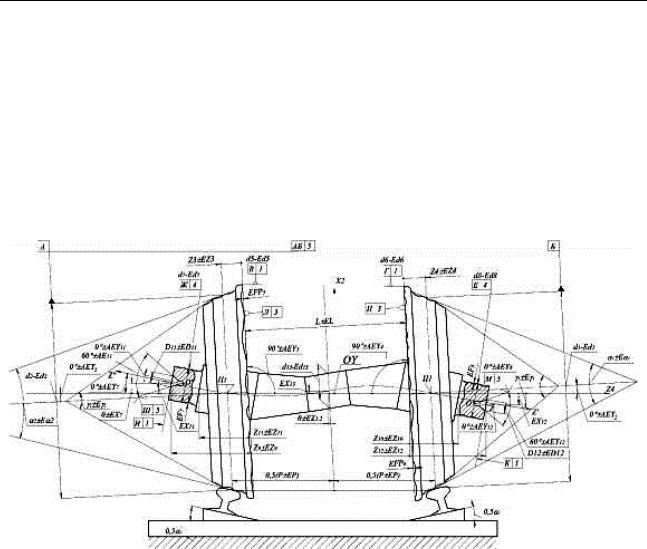
Для решения проблемы влияния геометрических параметров на сопротивление качению колесных пар по рельсовой колее была разработана геометрическая модель колесной пары. Модель представлена на рис. 2.
Рис. 2. Геометрическая модель вагонной колесной пары
Геометрическая модель – схематическое изображение всех рабочих геометрических элементов колесной пары с указанием размеров и погрешностей в единой обобщенной системе координат. Основное требование к геометрической модели – максимальная тождественность реальному объекту измерения за счет полного учета служебного назначения и геометрических величин расположения, размеров и формы поверхностей геометрических элементов колесной пары.
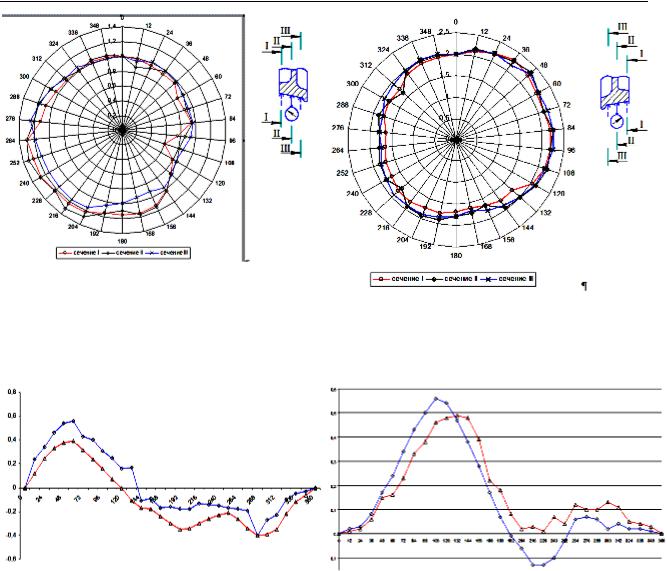
Адекватность геометрической модели подтверждена в ходе экспериментов, произведенных на базе вагонного ремонтного депо «Омсксортировочный» и показана на рис. 3, 4.
67
Ремонт и динамика подвижного состава
а) б)
Рис. 3. График радиального биения колес а - левое колесо; б - правое колесо
а) б)
Рис. 4. График торцового биения внутренних граней колес а - левое колесо; б - правое колесо
Геометрическая модель позволяет разработать адекватную математическую модель взаимодействия колесной пары и пути. Математическая модель необходима для оценки и систематизации влияния геометрических параметров на сопротивление качению колесных пар. На основе геометрических и математических моделей планируется разработка метода контроля сопротивлению качения колесной пары с учетом геометрических параметров, а так же разработка технических решений для внедрения на производство.
68

ТРАНСВУЗ – 2015
Список литературы
1. Андриевский, С. М. Боковой износ рельсов на кривых / С.М. Андриевский // Тру-ды ЦНИИ МПС. – М.: Трансжелдориздат, 1964. – Вып. 207.
2. Взаимодействие пути и подвижного состава / Е. М. Бромберг, М.Ф. Вериго, В. Н. Данилов, М. А. Фришман. – М.: Трансжелдориздат, 1956.
3. Вериго, М. Ф. Взаимодействие пути и подвижного состава / М. Ф. Вериго, А. Я. Коган. – М.: Транспорт, 1986. – 559 с.
4.Данилов, В. Н. Железнодорожный путь и его взаимодействие с подвижным составом / В. Н. Данилов. – М.: Трансжелдориздат, 1961. – 112 с.
5.Гура, Г. С. Механика и трибология движения колесной пары в рельсовой колее: монография / Г. С. Гура. – М.: ФГБОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2013. – 528 с.
6.Обобщение передового опыта тяжеловесного движения: вопросы взаимодействия колеса и рельса: пер. с англ. / У. Дж. Харрис, С. М.Захаров, Дж. Ландгрен, Х. Турне, В. Эберсен. – М.: Интекст, 2002. – 408 с.
7.Гарг, В. К. Динамика подвижного состава: пер. с англ / В. К. Гарг, Р. В. Дуккипати; под ред. Н. А. Панькина. – М.: Транспорт, 1988. – 391 с.
УДК 629.4.015
Ю. Ф. Савельев, В. Я. Шевченко, Н. Ю. Симак
ВИБРОЗАЩИТА ПОДВИЖНОГО СОСТАВА И ЭКИПАЖА НА ОСНОВЕ МЕХАНИЧЕСКИХ УСТРОЙСТВ
СО ЗНАКОПЕРЕМЕННОЙ УПРУГОСТЬЮ
В работе представлены результаты исследований состояния современного и типового рессорного подвешивания железнодорожных экипажей.
На основании опыта эксплуатации отечественного и зарубежного подвижного состава сделан вывод о необходимости модернизации его рессорного подвешивания в современных условиях. Представлены новые принципиальные конструктивные схемы виброзащитных устройств для различных типов подвижного состава.
69