

ТРАНСВУЗ-2015.Часть 2
.pdfРемонт и динамика подвижного состава
формирования бокового подреза головки рельса имеют коэффициент фактора безопасности движения, равный Г .Н 4 , что соответствует четырехкратному снижению уровня безопасности движения поездов.
Список литературы
1.Инструкция по текущему содержанию железнодорожного пути с изменениями и дополнениями в соответствии с Указанием МПС России №С-950 от 30.05.2000 г. (23456789)ЦП-774
2.Волнообразный износ рельсов / М. И. Кулагин, Н. Н. Лесовицкий, Д. С. Науменко [и др.] – М.: Изд-во Министерства коммунального хозяйства РСФСР, 1963. – 178 с.
3.Балух, Х. Диагностика верхнего строения пути / Х. Балух. М.: Транспорт, 1981. – 414 с.
4. Вериго, М. Ф. Взаимодействие пути и подвижного состава / М. Ф. Вериго, А. Я. Коган – М.: Транспорт, 1986. – 559 с.
5.Вынужденные колебания вагонов при движении по периодическим неровностям пути [текст] / В. А. Лазарян, В. Д. Данович, Л. А. Манашкин //Тр. ДИИТ, 1969. – Вып. 99. – С. 26 – 31.
6.Обобщение передового опыта тяжеловесного движения: вопросы взаимодействия колеса и рельса: Пер. с англ./ У. Дж. Харрис, С. М. Захаров, Дж Ландгрен, Х. Турне, В. Эберсен. М.: Интекст, 2002. – 408 с.
УДК 629.45
В. В. Кобищанов, Д. Я. Антипин, С. Г. Шорохов
ОЦЕНКА ДИНАМИЧЕСКОЙ НАГРУЖЕННОСТИ ОТЕЧЕСТВЕННЫХ ПАССАЖИРСКИХ ВАГОНОВ ПРИ АВАРИЙНЫХ СОУДАРЕНИЯХ ПОЕЗДОВ С ПРЕПЯТСТВИЯМИ
Проведена оценка динамической нагруженности кузовов отечественных пассажирских вагонов при аварийных соударениях поездов с препятствиями. На основе разработанных твердотельных компьютерных моделей соударения выполнено математическое моделирование аварийных ситуаций и получены графики распределения
50

ТРАНСВУЗ – 2015
максимальных сжимающих усилий и ускорений, действующих в конструкциях подвижного состава при соударениях с нормированными скоростями.
Обеспечение безопасности движения поездов является одной из ключевых задач стабильного и прогрессивного функционирования железнодорожной отрасли России, что особо актуально в условиях развития высокоскоростного железнодорожного сообщения. Ввод в эксплуатацию современного пассажирского подвижного состава с повышенными скоростями движения ставит перед железными дорогами задачу повышения его механической безопасности в аварийных ситуациях, связанных с продольными соударениями поездов с препятствиями.
Решение данной задачи возможно лишь на основе детального анализа динамической нагруженности несущих конструкций пассажирских вагонов отечественного производства при аварийных соударениях. Требования по механической безопасности современного отечественного пассажирского подвижного состава при аварийных соударениях поездов с препятствиями, предусматривающего установку аварийных крэш-систем, регламентированы ГОСТ 32410-2013 [1], который определяет наиболее вероятные сценарии развития аварийной ситуации и требования к устройствам безопасности. Указанный стандарт выделяет два сценария столкновения для пассажирских вагонов локомотивной тяги с конструкционной скоростью 160 км/ч: сценарий 1
– аварийное столкновение на железнодорожном переезде с автомобилем массой 10 т со скоростью 72 км/ч; сценарий 2 – аварийное столкновение с грузовым вагоном массой 80 т со скоростью 36 км/ч. В сценарии столкновения принимает участие поезд в составе головного локомотива и четырех пассажирских вагонов одной конструкции (рис. 1, 2).
Рис. 1. Схема аварийного столкновения по сценарию 1
51

Ремонт и динамика подвижного состава
Рис. 2. Схема аварийного столкновения по сценарию 2
Оценка динамической нагруженности пассажирских вагонов при аварийных соударениях поездов с препятствиями проводится методами компьютерного моделирования в твердотельной постановке средствами промышленного программного комплекса моделирования кинематики и динамики систем тел «Универсальный механизм» [2].
Для оценки влияния типа расчетной схемы на динамическую нагруженность кузовов вагонов в аварийной ситуации сформированы три варианта компьютерной модели пассажирского поезда:
–1 вариант – упрощенная твердотельная компьютерная модель;
–2 вариант – уточненная твердотельная компьютерная модель;
–3 вариант – гибридная компьютерная модель.
Впервом варианте расчетной схемы пассажирский поезд представляется
ввиде совокупности систем связанных твердых тел, описывающих его пространственные колебания. На базе исходных данных о геометрических, инерционных и силовых характеристиках элементов конструкций поезда производится формирование его расчетной схемы.
Компьютерная модель пассажирского вагона состоит из модели кузова, представленного абсолютно твердым телом с реальными геометрическими и инерциальными характеристиками, обладающим шестью степенями свободы, соединенного с двумя моделями тележек, представленными совокупностью абсолютно твердых тел, моделирующих раму и две колесные пары, связанных между собой силовыми элементами и шарнирами. Колесная пара моделируется абсолютно твердым телом, обладающим шестью степенями свободы.
Моделирование взаимодействия вагонов поезда между собой осуществляется включением в расчетную схему вагона компьютерной модели автосцепного устройства в виде системы абсолютно твердых тел, взаимодействующих посредством вращательных шарниров и контактных элементов.
52

ТРАНСВУЗ – 2015
Компьютерная модель локомотива аналогичная модели вагона и представляется совокупностью абсолютно твердых тел, соединенных посредством силовых упругих, диссипативных, контактных элементов и вращательных шарниров. Упруго-диссипативными и контактными элементами кузов локомотива соединен с моделями тележек и автосцепным устройством. Отличительной особенностью модели локомотива является создание тягового усилия за счет введения на каждую колесную пару специального вращающего момента. Тяговые усилия через компьютерные модели автосцепок передаются к вагонам поезда. Таким образом, реализуется реальная схема движения пассажирского состава.
Второй вариант расчетной схемы пассажирского поезда характеризуется детальной проработкой компьютерных моделей тележек пассажирских вагонов, учитывающих силы взаимодействия кузова вагона с тележками, элементов тележек между собой и рельсовым путем. Для этого в исходную модель вагона в качестве подсистем включены компьютерные модели тележек. Кроме того, в компьютерную модель поезда включена модель магистрального пассажирского электровоза ЧС-7, позволяющая максимально достоверно оценить динамическую нагруженность пассажирских вагонов при столкновении поезда с препятствием.
Третий вариант расчетной схемы пассажирского поезда представляет собой гибридную компьютерную модель. В данной расчетной схеме первый пассажирский вагон с головы поезда представлен его гибридной моделью. Данная компьютерная модель представляет собой кузов в виде детализированной пластинчатой конечно-элементной расчетной схемы, связанный силовыми элементами и шарнирами с твердотельными моделями тележек и автосцепных устройств.
Верификация разработанных компьютерных моделей вагонов выполнена путем сопоставления данных натурных ходовых испытаний и испытаний на соударение с результатами расчетов. Анализ результатов показал, что удовлетворительное соответствие данных моделирования результатам экспериментов показывают уточненная твердотельная и гибридная модели вагона.
В упрощенной твердотельной модели соударения компьютерные расчетные схемы препятствий представляют собой абсолютно твердые тела,
53
Ремонт и динамика подвижного состава
обладающие одной поступательной степенью свободы в направлении оси движения поезда. В уточненной твердотельной компьютерной модели соударения поезда с препятствием, а также в гибридной расчетной схеме в качестве препятствий использованы компьютерные модели грузового автомобиля массой 10 т и грузового вагона массой 80 т.
Оценка динамической нагруженности единиц пассажирского поезда при его столкновении с препятствием проводилась в рамках моделирования аварийных ситуаций с использованием разработанных компьютерных моделей поезда и препятствий в соответствии с условиями расчетных сценариев.
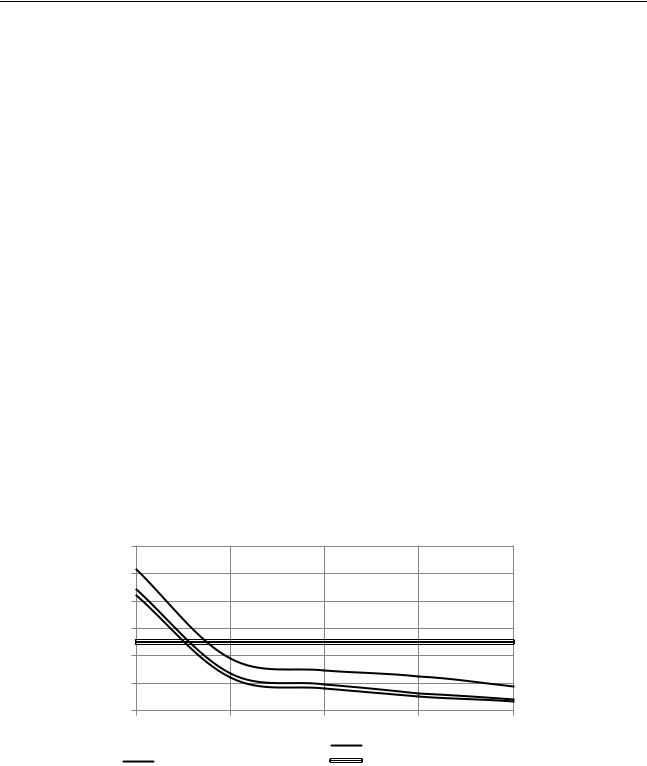
В качестве результатов моделирования приведены графики распределения максимальных сжимающих усилий по длине поезда при его столкновении с препятствием массой 10 т со скоростью 72 км/ч (рис. 3) и столкновении с препятствием массой 80 т со скоростью 36 км/ч (рис. 4). Значения N, указанные на оси абсцисс, соответствуют номеру экипажа в составе поезда, то есть N=1 соответствует локомотиву, N=2 – первому пассажирскому вагону и т.д. Приведенные результаты соответствуют оборудованию локомотива и пассажирских вагонов штатными автосцепными устройствами с соответствующими поглощающими аппаратами.
F, МН
6
5
4
3
2
1
0
1 |
2 |
3 |
4 |
5 N |
|
|
|
|
|
|
|
|
|
упрощенная твердотельная модель |
|
уточненная твердотельная модель |
|
|
|
|
|||
|
|
гибридная модель |
|
предельное значение силы |
|
Рис. 3. Распределение максимальных сжимающих усилий по длине поезда при столкновении с автомобилем
Как видно из результатов моделирования, при столкновении поезда с автомобилем в элементах несущей конструкции локомотива могут возникать
54
ТРАНСВУЗ – 2015
пластические деформации. При этом на вагоны воздействуют усилия, не приводящие к их пластическому деформированию.
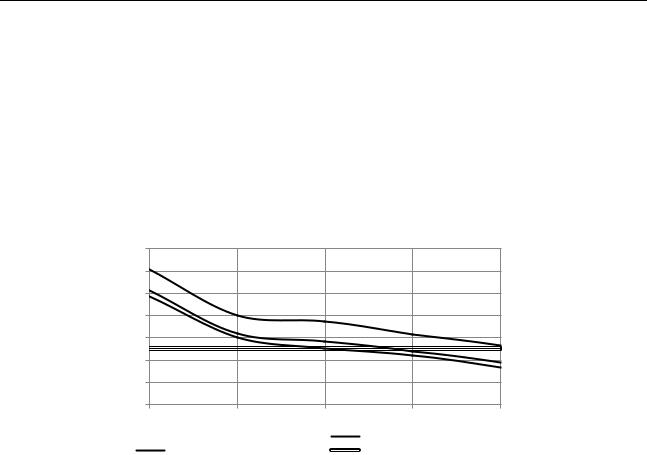
При столкновении поезда с препятствием, соответствующим по массе загруженному грузовому вагону, пластические деформации могут наблюдаться в несущих конструкциях локомотива и первых трех пассажирских вагонов (N=2,3,4), что свидетельствует о необходимости снижения динамической нагруженности вагонов для исключения их разрушения.
F, МН
7
6
5
4
3
2
1
0
1 |
2 |
3 |
4 |
5 N |
|
|
|
|
|
|
|
|
|
упрощенная твердотельная модель |
|
уточненная твердотельная модель |
|
|
|
|
|||
|
|
гибридная модель |
|
предельное значение силы |
|
Рис. 4. Распределение максимальных сжимающих усилий по длине поезда при столкновении с грузовым вагоном
Одним из параметров, определяющих динамическую нагруженность вагонов и влияющих на их несущую способность, являются действующие в элементах конструкции ускорения, возникающие при столкновении. При моделировании расчетных сценариев столкновения получены графики распределения ускорений по длине поезда (рис. 5, 6).
Анализ результатов моделирования показывает, что при столкновении пассажирского поезда с автомобилем наибольшие ускорения воздействуют на локомотив, но не превышают допустимый уровень 5g. При столкновении по сценарию 2 величина ускорений, действующих на первые два пассажирских вагона, превышает критическое значение, что повышает риск травмирования пассажиров внутри поезда и может привести к разрушению креплений подвагонного оборудования и элементов интерьера вагона.
55

Ремонт и динамика подвижного состава
a, g
6
5 
4
3
2
1
0
1 |
2 |
3 |
4 |
5 N |
||
|
|
упрощенная твердотельная модель |
|
|
уточненная твердотельная модель |
|
|
|
|
||||
|
|
гибридная модель |
|
|
предельное значение ускорения |
|
|
|
|
|
|||
Рис. 5. Распределение ускорений по длине поезда при столкновении с автомобилем
a, g
8
6
4
2
0
1 |
2 |
3 |
4 |
5 N |
||
|
|
упрощенная твердотельная модель |
|
|
уточненная твердотельная модель |
|
|
|
|
||||
|
|
гибридная модель |
|
|
предельное значение ускорения |
|
|
|
|
|
|||
Рис. 6. Распределение ускорений по длине поезда при столкновении с грузовым вагоном
Полученные результаты свидетельствуют о необходимости снижения действующих ускорений с учетом возможного роста скоростей соударения пассажирских поездов с препятствиями.
Список литературы
1.ГОСТ 32410-2013. Крэш-системы аварийные железнодорожного подвижного состава для пассажирских перевозок. Технические требования и методы контроля.
2.«Универсальный механизм». Руководство пользователя, 2006.
56

ТРАНСВУЗ – 2015
УДК 629.4
А. Н. Смалев
ПРИМЕНЕНИЕ СТРУКТУРНЫХ СХЕМ ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИКИ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНЫХ ДОРОГ
Рассмотрена возможность применения структурных схем для исследования динамики подвижного состава. Приведен пример составления структурной схемы для линейчатой расчетной схемы механической колебательной системы на основе дифференциальных уравнений и сформулированы общие закономерности, позволяющие составить структурную схему без использования этих уравнений.
При исследовании динамики подвижного состава, как и любых других сложных механических систем, возникают сложности при нахождении аналитического решения поставленной задачи. Затруднения возникают уже при рассмотрении систем 6 – 8 порядков. Специализированные программы позволяют справиться с этой проблемой, однако само решение в аналитической форме выглядит достаточно громоздким. Для систем более высоких порядков такой подход в целом является нецелесообразным.
В этих случаях для решения систем дифференциальных уравнений часто применяют численные методы, а результаты представляют в виде различных таблиц и графиков, которые являются с точки зрения восприятия более информативными. Способы получения подобной информации весьма разнообразны; сюда в том числе можно отнести компьютерные программы, позволяющие выполнить имитационное моделирование динамических процессов, протекающих в механической системе «экипаж – путь». Решение задач с помощью такого подхода часто называют системной динамикой.
Одним из способов представления свойств динамической системы является структурная схема, отражающая основные элементы и связи между ними. Для проведения имитационного моделирования можно воспользоваться классическим подходом теории динамических систем к составлению структурных схем, который чаще всего применяется в теории автоматического управления. Суть такого подхода заключается в представлении отдельных узлов подвижного состава в виде динамических звеньев, преобразующих
57

Ремонт и динамика подвижного состава
сигналы – информацию о процессах движения и силового взаимодействия в механической системе, и указании связей, передающих сигналы от одного звена к другому.
Известно, что по полученной структурной схеме системы в случае необходимости можно составить уравнения ее динамики, причем такая задача будет иметь всегда единственное решение. Чаще решается обратная задача – составление структурной схемы системы по известным уравнениям. Такой подход к исследованию динамических систем можно встретить в работах профессоров А. П. Хоменко, С. В. Елисеева и других ученых ИрГУПСа, где кроме составления структурных схем решается задача нахождения передаточных функций, описывающих свойства систем и характеризующих их реакцию (отклик) на внешние воздействия, представляющую изменение во времени координат системы и сил взаимодействия ее узлов между собой и окружающей средой. Тем не менее, в этих работах и структурные схемы, и передаточные функции формируются на основе составленных ранее дифференциальных уравнений. Кроме того, подход этих авторов несколько отличается от классического представления структурных схем. В настоящей работе рассматривается возможность формирования структурной схемы напрямую по заданной расчетной схеме без предварительной записи системы дифференциальных уравнений, по крайней мере, для систем типа «подвижной состав – путь».
К сожалению, полностью исключить составление каких-либо уравнений не возможно. Тем не менее, исчезает необходимость в получении всей системы дифференциальных уравнений, каждое полученное при формировании структурной схемы уравнение рассматривается отдельно, а их взаимосвязь учитывается уже в самой схеме. Общие принципы такого подхода к моделированию динамических систем сводится к следующему. Любая механическая система состоит главным образом из твердых тел, обладающих инерционными свойствами, и упруго-диссипативных связей между ними. Именно эти свойства отражают в расчетной схеме. В некоторых случаях массой или моментом инерции тел можно пренебречь, а в связях – диссипативными свойствами. Каким образом эти параметры механической системы учитываются в структурной схеме?
58

ТРАНСВУЗ – 2015
Основными элементами структурной схемы являются одномерное динамическое звено с некоторой передаточной функцией (или статической характеристики в случае нелинейного звена), узел и сумматор (или устройство сравнения) [1]. Более сложные элементы всегда можно составить из перечисленных ранее. Идеальное динамическое звено преобразует сигнал, умножая его на некоторую постоянную величину, либо интегрируя или дифференцируя его. Узел необходим в том случае, если один и тот же сигнал оказывает воздействие на несколько элементов системы. Сумматор или устройство сравнения выполняют соответственно операции сложения или вычитания сигналов. Наиболее простым примером может служить механическая колебательная система с одной степенью свободы типа пружинного маятника и кинематическим возмущением, рассмотренная в работе [2]. Для формирования схемы было получено одно дифференциальное уравнение, из которого выразили силу инерции через все остальные силы, действующие на систему (внешние силы и реакции связей). Таким образом, основным элементом в схеме является твердое тело, обладающее инерционными свойствами, относительно которого записывается общее уравнение динамики:
Fин mx Fi Rj . |
(1) |
Количество таких звеньев зависит от числа обобщенных координат, внешние воздействия и реакции, действующие на выбранный элемент, рассматриваются в виде проекции на соответствующую ось координат. В случае угловой обобщенной координаты, составляется уравнение моментов и в нем выражается момент силы инерции:
Mин m MiF M Rj . |
(2) |
Выходным сигналом каждого элемента является обобщенная координата, которую всегда можно выразить из уравнений (1) и (2), дважды проинтегрировав силы (или момент силы) инерции и поделив на соответствующий инерционный параметр. В подобных задачах принято использовать не сами сигналы (функции времени), а их комплексные изображения по Лапласу, следовательно, обобщенные координаты могут быть получены следующим образом:
59