

88. Принцип построения системы автоведения на электровозе эр-2 (Автомашинист (усавп – л)).
Все контакты объединены в групповом переключателе с приводом Решетова. На ЭР2 групповой переключатель имеет 18 позиций: 1-9: последовательное соединение; 10,11 – две ступени ослабления поля; 12-16 – реостатный пуск на параллельном соединении; 17,18 – ослабление поля на параллельном соединении ТД-й; 16-я позиция ходовая.
Высокоскоростной ЭПС практически не может обойтись без систем автономного автоведения. На высоких скоростях время принятия решений во внештатных ситуациях ограничено. Система автоведения (как было указанно ранее) освобождает машиниста от функций управления и у него появляется возможность контролировать и соблюдать все условия безопасного движения.
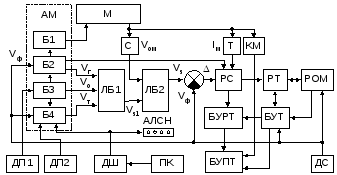
Система автоведения, функциональная схема
Система автоведения является надстройкой над одноконтурной САР скорости движения. В качестве исполнительного элемента в САР использованы реостатный контроллер для управления пуско-тормозным реостатом и импульсный преобразователь для плавного регулирования возбуждения ТЭД. Роль автомашиниста заключается в задании оптимального управления на САР и подержание графика движения в изменяющихся условиях (сигналы АЛСН, ограничения скорости). Машинист выполняет функции контроля и может в любой момент вмешаться в процесс управления. Система автоведения позволяет полностью контролировать свою работу и вносить информацию для корректировки исходных данных (масса поезда, временные ограничения и тд.). Система автоматического управления торможением обеспечивает правильную последовательность применения двух видов торможения (реостатного и электропневматического). АМ – автомашинист; М – машинист; С – набор кнопок, выполняющий роль кнопочного контроллера управления, с помощью которого машинист воздействует на систему, задавая ограничение скорости Vом; Т – переключатель, позволяющий машинисту задавать предельные значения пускового и тормозного тока (Iм); КМ – Кран машиниста для ручного управления электропневматическим торможением; Б1 – Функциональный блок АМ, который вычисляет отклонение от заданного времени хода по перегону и производит индикацию этого процесса для машиниста; Б2 – Функциональный блок АМ, который хранит заданный график движения, заданные ограничения скоростей и формирует сигнал графиковой скорости (Vг) Б3 – Функциональный блок АМ, который осуществляет считывание сигналов Б2, Б4 и путевого датчика ДП1. В зависимости от графика движения, постоянно действующих ограничений, места положения на перегоне и сигналов АЛСН Б3 формирует сигнал ограничения скорости (Vо); Б4 – Функциональный блок АМ, который управляет прицельным торможением в соответствии с сигналами, поступающими через приёмные катушки (ПК) на дешифратор (ДШ) АЛСН, и сигналами путевых датчиков ДП2; ДП1 – бесконтактные точечные путевые датчики расположенные на границе станций, сигналы от них корректируют момент запуска считывающего устройства Б3 в начале каждого перегона; ДП2 – бесконтактные точечные путевые датчики, подают сигналы о проследовании характерных точек пути, соответствующих остановочным пунктам и началу и окончанию участков с ограничениями скорости, и служат точками для корректировки пройденного пути. Основная информация о пройденном пути вырабатывается в системе в результате интегрирования сигнала Vф поступающего от датчика скорости ДС. При этом могут возникать накапливающиеся неточности. Поэтому сигналы от датчиков ДП2 и сигналы от дешифратора АЛСН (ДШ) позволяют корректировать систему в те моменты, когда требуются точные данные о месте расположения поезда на перегоне; ДС – датчики скорости; ЛБ1 и ЛБ2 – логические блоки, Представляют собой логические элементы выбирающие минимальное значение заданной скорости из нескольких вариантов. На выходе ЛБ2 формируется заданное значение скорости (Vз); РТ – Регулятор тока; РС – регулятор скорости, выдаёт управляющиё сигнал на регулятор тока (РТ) и на управление тормозами локомотива; РОМ – регулятор ограничения мощности тормозных резисторов; БУТ – блок управления тормозами – осуществляет необходимое их замещение в зависимости от сигналов подаваемых от РТ и РОМ; БУРТ – блок управления реостатным тормозом; БУПТ - блок управления электропневматическим тормозом.