

45. Электродвигательный и пневмодвигательный приводы электрических аппаратов
Электродвигательный привод электрических аппаратов
В
нем движение контактных систем создается
электродвигателем. От электродвигателя
через распределительно-преобразовательный
механизм. «+»: -простота управления и
реверсирование; -высокая надежность;
-стабильная скорость перемещения и
возможность изменения ее в широких
пределах; -большое количество рабочих
позиций; -высокие контактные нажатия;
-один источник энергии – электрическая
энергия. «-»: -сложность и громоздкость
конструкции передаточно-распределительного
механизма; -сложность четкой остановки
и фиксации на рабочих позициях. Применение:
силовые контроллеры (главный контроллер
ЭКГ-8). Структурная
схема электродвигательного привода:
Серводвигатель → Предохранительная
муфта → передаточно-распределительный
механизм → валы переключателей. В
качестве серводвигателей
используют двигатели постоянного тока
с независимым или параллельным
возбуждением. Uн.сд=50В
(от цепей управления). Nн.сд=
1000-1600 об/мин. Предохранительная
муфта допускает
передачу усилия не выше определенного
значения, т.е если момент превышает это
значение, то муфта прощелкивается
(перестает передавать момент). Муфта
защищает передаточно-распределительный
механизм и серводвигатель от повреждений,
возникающих в результате заклинивания
аппаратов. Способы
повышения четкой остановки и фиксации
электродвигательного привода на рабочих
позициях (их 3):1)Дополнительный
фрикционный дисковый тормоз, расположенный
на валу серводвигателя и получающего
питание при снятии напряжения с двигателя.
2)Электрическое торможение серводвигателя.
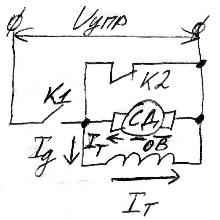 .
При включении контактора К, контакт К1
замыкается, К2 – размыкается. На
серводвигатель подается напряжение и
он начинает вращаться и переключает
позиции. При отключении контактора К,
К1 размыкается, снимая напряжение с
серводвигателя, а контакт К2 – замыкается,
замыкая накоротко обмотку якоря,
двигатель переводится в режим
электродинамического торможения.
3)Специальные типы передач для прерыв-го
соединения вала серводвигателя с валами
переключателей.Схема
передачи с мальтийским крестом (главный
контроллер ЭКГ-8Ж):
.
При включении контактора К, контакт К1
замыкается, К2 – размыкается. На
серводвигатель подается напряжение и
он начинает вращаться и переключает
позиции. При отключении контактора К,
К1 размыкается, снимая напряжение с
серводвигателя, а контакт К2 – замыкается,
замыкая накоротко обмотку якоря,
двигатель переводится в режим
электродинамического торможения.
3)Специальные типы передач для прерыв-го
соединения вала серводвигателя с валами
переключателей.Схема
передачи с мальтийским крестом (главный
контроллер ЭКГ-8Ж):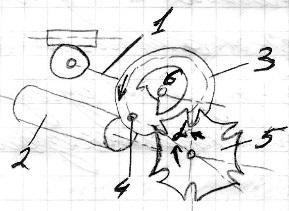 .
1 – ведущий вал, связанный с серводвигателем;
2 – вал переключателя; 3 – ведущий
барабан; 4 – выступ; 5 – ведомый крест;
6 – блокирующий сектор. Вал 1 вращает
барабан 3, выступ 4 которого сходит в
зацепление с пазом креста 5 и поворачивает
его на угол α=60°. При дальнейшем повороте
барабана 3 крест 5 блокируется сектором
6.
.
1 – ведущий вал, связанный с серводвигателем;
2 – вал переключателя; 3 – ведущий
барабан; 4 – выступ; 5 – ведомый крест;
6 – блокирующий сектор. Вал 1 вращает
барабан 3, выступ 4 которого сходит в
зацепление с пазом креста 5 и поворачивает
его на угол α=60°. При дальнейшем повороте
барабана 3 крест 5 блокируется сектором
6.
Пневмодвигательный привод электрических аппаратов
Сила,
прикладываемая к контактной системе
создается группой пневматических
цилиндров под управлением
электропневматических вентилей. «+»:
-большое количество рабочих позиций;
-четкая фиксация на рабочих позиций;
-высокие контактные нажатия. «-»:
-сложность управления; -сложность
конструирования; -сложность обслуживания;
-некоторые разновидности привода не
реверсируются; -требуется два вида
энергии – электрическая энергия и
энергия сжатого газа. Применение: силовые
контроллеры (силовые контроллеры
электровозов ЧС и электропоездов). В
зависимости от числа и конфигурации
расположения пневматических цилиндров,
способа управления вентилями и способа
преобразования двигателя существует
несколько разновидностей пневмодвигательного
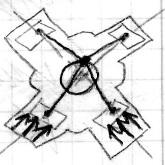
привода. 1)Пневмодвигательный
привод главных контроллеров электровозов
ЧС:
 .
А, В, С, D
– пневматические цилиндры; О – ось
вращения коленчатого вала; 1,2 – сдвоенные
электропневматические вентили. Каждый
вентиль представляет собой как бы 2
вентиля: включающий и отключающий. ВВ
– вентиль включающего типа; ОВ – вентиль
отключающего типа. Исходное
состояние:
оба вентиля обесточены; ВВ закрыты; ОВ
– открыты. Воздух подается в цилиндры
А, В. Коленчатый вал в точке О1.
Управление производится в 4 такта. 1
такт: подается
напряжение на вентиль 1. Сжатый воздух
выпускается из цилиндра А и подается в
цилиндр С. Ось коленчатого вала
перемещается в точку О2:
.
А, В, С, D
– пневматические цилиндры; О – ось
вращения коленчатого вала; 1,2 – сдвоенные
электропневматические вентили. Каждый
вентиль представляет собой как бы 2
вентиля: включающий и отключающий. ВВ
– вентиль включающего типа; ОВ – вентиль
отключающего типа. Исходное
состояние:
оба вентиля обесточены; ВВ закрыты; ОВ
– открыты. Воздух подается в цилиндры
А, В. Коленчатый вал в точке О1.
Управление производится в 4 такта. 1
такт: подается
напряжение на вентиль 1. Сжатый воздух
выпускается из цилиндра А и подается в
цилиндр С. Ось коленчатого вала
перемещается в точку О2:
 .2
такт: продолжая
запитывать вентиль 1, подается напряжение
на вентиль 2. Воздух выпускается из
цилиндра В и подается в цилиндр D:
.2
такт: продолжая
запитывать вентиль 1, подается напряжение
на вентиль 2. Воздух выпускается из
цилиндра В и подается в цилиндр D:
 .3
такт: продолжая
запитывать вентиль 2, напряжение снимается
с вентиля 1. Сжатый воздух выпускается
из цилиндра С и подается в цилиндр А.
Коленчатый вал поворачивается еще на
90°:
.3
такт: продолжая
запитывать вентиль 2, напряжение снимается
с вентиля 1. Сжатый воздух выпускается
из цилиндра С и подается в цилиндр А.
Коленчатый вал поворачивается еще на
90°:
 .4
такт: при
обесточенном вентиле 1 снимается питание
с вентиля 2. При этом сжатый воздух
выпускается из цилиндра D
и подается в цилиндр В. Коленчатый вал
поворачивается еще на 90° и приходит в
исходное состояние. На электровозах
ЧС1, ЧС2 в приводе главных контроллеров,
пневматические цилиндры располагаются
V-образно
и изменена конструкция коленчатого
вала. При этом кривошипы имеют смещение
на 180° относительно друг друга.
Разновидности привода применяемые на
ЧС являются реверсируемость. Для
реверсирования необходимо изменить
алгоритм подачи напряжения на вентилях
1,2. 2)Пневмодвигательный
привод силовых контроллеров электропоздов
(привод системы И.Н.Решетова):
.4
такт: при
обесточенном вентиле 1 снимается питание
с вентиля 2. При этом сжатый воздух
выпускается из цилиндра D
и подается в цилиндр В. Коленчатый вал
поворачивается еще на 90° и приходит в
исходное состояние. На электровозах
ЧС1, ЧС2 в приводе главных контроллеров,
пневматические цилиндры располагаются
V-образно
и изменена конструкция коленчатого
вала. При этом кривошипы имеют смещение
на 180° относительно друг друга.
Разновидности привода применяемые на
ЧС являются реверсируемость. Для
реверсирования необходимо изменить
алгоритм подачи напряжения на вентилях
1,2. 2)Пневмодвигательный
привод силовых контроллеров электропоздов
(привод системы И.Н.Решетова):
 .
1,2 – пневматический цилиндр; 3,4 – поршень;
5 – рейка; 6 – шестерня (звезда); 7,8 –
ролик; 9,10 – электропневматические
вентили включающего типа; 11 – вал
привода. Лучи звезды имеют специальный
ассиметричный профиль, благодаря
которому конец луча оказывается не
напротив центра ролика, а несколько
выше или ниже.
Исходное состояние:
поршни 3,4 вместе с рейкой 5 находится в
крайнем правом положении, ролик 7
располагается во впадине звезды, блокируя
ее. Процесс
переключения:
при обесточенном вентиле 9, подается
напряжение на вентиль 10. Сжатый воздух
поступает в цилиндр 2, действует на
поршень 4, рейка 5 перемещается влево,
ролик 8 взаимодействует с лучом звезды,
катится по нему и поворачивает звезду
на угол 60° против часовой стрелки. В
конце хода рейки, ролик 8 оказывается
во впадине звезды, блокируя ее, а ролик
7 чуть выше луча звезды. Для последующего
переключения надо снять питание с
вентиля 10 и подать питание на вентиль
9. Рейка переместится вправо, ролик 7
повернет звезду еще на 60°. Особенности
привода:
-обязательное равенство углов между
всеми позициями кулачкового вала, в том
числе между последующей и первой;
-нереверсируемость. Сброс позиций
производится вращением вала аппарата
до выхода на нудевую позицию в сторону
набора.
.
1,2 – пневматический цилиндр; 3,4 – поршень;
5 – рейка; 6 – шестерня (звезда); 7,8 –
ролик; 9,10 – электропневматические
вентили включающего типа; 11 – вал
привода. Лучи звезды имеют специальный
ассиметричный профиль, благодаря
которому конец луча оказывается не
напротив центра ролика, а несколько
выше или ниже.
Исходное состояние:
поршни 3,4 вместе с рейкой 5 находится в
крайнем правом положении, ролик 7
располагается во впадине звезды, блокируя
ее. Процесс
переключения:
при обесточенном вентиле 9, подается
напряжение на вентиль 10. Сжатый воздух
поступает в цилиндр 2, действует на
поршень 4, рейка 5 перемещается влево,
ролик 8 взаимодействует с лучом звезды,
катится по нему и поворачивает звезду
на угол 60° против часовой стрелки. В
конце хода рейки, ролик 8 оказывается
во впадине звезды, блокируя ее, а ролик
7 чуть выше луча звезды. Для последующего
переключения надо снять питание с
вентиля 10 и подать питание на вентиль
9. Рейка переместится вправо, ролик 7
повернет звезду еще на 60°. Особенности
привода:
-обязательное равенство углов между
всеми позициями кулачкового вала, в том
числе между последующей и первой;
-нереверсируемость. Сброс позиций
производится вращением вала аппарата
до выхода на нудевую позицию в сторону
набора.