

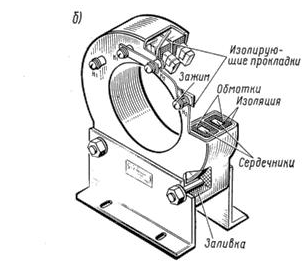
86. Принцип работы и устройство трансформатора постоянного тока (датчика тока) на эпс.
По своему принципу действия трансформатор постоянного тока представляют собой простейший магнитный усилитель с одной рабочей и одной управляющей обмотками без обратных связей.
Трансформатор
постоянного тока по устройству напоминает
трансформатор постоянного напряжения,
но не имеет специальной обмотки
управления. Для подмагничивания
трансформатора постоянного тока через
центральное отверстие его тороидального
сердечника пропущены гибкие провода
силовой цепи. На тепловозах 2ТЭ10Л, 2ТЭ10В
через трансформатор постоянного тока
пропущены два провода, по которым
проходит ток двух тяговых электродвигателей.
При увеличении тока тяговых двигателей,
а следовательно, и генератора усиливается
подмагничивание трансформатора
постоянного тока и возрастает выходной
ток его рабочей обмотки. Таким образом,
ток в рабочей цепи трансформатора
пропорционален суммарному току двух
тяговых электродвигателей. Максимальный
ток в рабочей цепи трансформатора лишь
незначительно превышает 3 А. Трансформатор
постоянного тока как бы преобразует
ток большой величины в силовой цепи в
пропорциональный ему слабый ток для
использования его в системе автоматического
регулирования напряжения тягового
генератора.
87. Принцип построения мпсу на электровозе эп1 (мсуд).
Аппаратура микропроцессорной системы управления и диагностики (МСУД) выполняет автоматическое управление электроприводом и электрическими аппаратами магистрального серийного пассажирского электровоза ЭП1. Применение современной элементной базы, такой как высокопроизводительные IBM PC-совместимые микропроцессорные контроллеры для тяжёлых условий эксплуатации, высоконадёжные преобразователи напряжения электролюминесцентные и ЖК дисплеи для низких температур, позволило создать систему управления и контроля, практически не требующую обслуживания. Аппаратура МСУД состоит из шкафа с тремя контроллерами: центрального и двух технологических с разделёнными функциями управления электрооборудованием, диагностики и возможностью передачи управления друг другу при реконфигурации в случае повреждения одного из контроллеров, а также блока индикации.
Центральный контроллер обеспечивает обмен информацией между всеми контроллерами управления и пультом машиниста по дублированному интерфейсу RS-485, диагностику состояния электрооборудования и связь с приборами АСУ безопасности по интерфейсу RS-232.
Технологический контроллер управления последовательно опрашивает различные датчики, сельсины задатчиков тока и скорости, принимает дискретные сигналы состояния оборудования электровоза. Он же вычисляет значения выходных управляющих воздействий и выдаёт фазовые импульсы управления выпрямительно - инверторными преобразователями, фазовые импульсы управления выпрямительными установками возбуждения и дискретные сигналы управления силовыми реле и пневмовентилями.
В аппаратуре МСУД реализовано резервирование технологических контроллеров с так называемым "холодным" резервом. При возникновении неисправности в рабочем комплекте он отключается от объекта управления и в работу включается другой комплект
Аппаратура МСУД обеспечивает:
Разгон электровоза до заданной скорости с заданной и автоматически поддерживаемой величиной тока якоря тяговых электродвигателей;
Автоматическое поддержание заданной скорости;
Рекуперативное торможение до заданной скорости с последующим автоматическим поддержанием заданной скорости на спусках;
Автоматическое плавное торможение с учётом тормозных характеристик до полной остановки электровоза;
Защиту от буксования и юза колёсных пар;
Автоматическую непрерывную диагностику состояния оборудования электровоза;
Стыковку микропроцессорных контроллеров с аппаратурой АСУ безопасности;
Подключение микропроцессорных контроллеров к IBM PC-совместимым персональным компьютерам для отладки рабочих программ и моделирования процесса управления;
Режим автоведения.
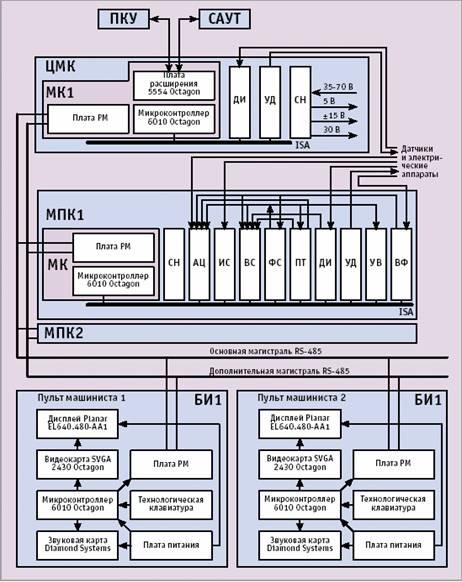
На структурной схеме показаны: ЦМК — центральный микропроцессорный контроллер; ПКУ — приемно-контактирующее устройство; САУТ — система автоматического управления торможением; МК — ячейка микропроцессорного контроллера; ДИ — ячейка ввода дискретных сигналов; УД — ячейка вывода дискретных сигналов; СН — ячейка вторичных источников питания; РМ — ячейка резервированной магистрали; МПК — технологический микропроцессорный контроллер; АЦ — ячейка аналого-цифрового преобразователя; ИС — ячейка ввода импульсных сигналов; ВС — ячейка ввода аналоговых сигналов; ФС — ячейка фазовой синхронизации; ПТ — ячейка программируемых таймеров; УВ — ячейка выходных усилителей; ВФ — ячейка входного фильтра; БИ1 — блок индикации и ввода команд.