

Задача линейного программирования
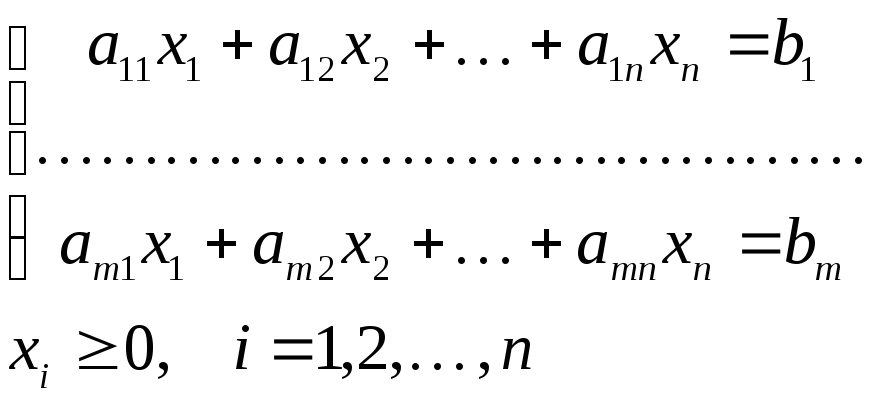
В общем случае задача линейного программирования записывается так, что ограничениями являются как уравнения, так и неравенства, а переменные могут быть как неотрицательными, так и произвольно изменяющимися. В случае, когда все ограничения являются уравнениями и все переменные удовлетворяют условию неотрицательности, задачу линейного программирования называют канонической. Каноническая задача линейного программирования в координатной форме записи имеет вид:
![]()
Используя знак суммирования эту задачу можно записать следующим образом:
![]()
![]()
![]()
Каноническая задача линейного программирования в векторной форме имеет вид:

В данном случае введены векторы:
![]() ,
,![]()
 ,
, ,
,![]()
Здесь
![]() – скалярное произведение векторов
– скалярное произведение векторов![]() и
и![]() .
.
Каноническая задача линейного программирования в матричной форме записи имеет вид:

где:

 ,
, .
.
Здесь
![]() – матрица коэффициентов системы
уравнений,
– матрица коэффициентов системы
уравнений,![]() – матрица-столбец переменных задачи;
– матрица-столбец переменных задачи;![]() – матрица-столбец правых частей системы
ограничений.
– матрица-столбец правых частей системы
ограничений.
Нередко используются задачи линейного программирования, называемые симметричными, которые в матричной форме записи имеют вид:
 или
или
Приведение общей задачи линейного программирования к канонической форме
В большинстве методов решения задач линейного программирования предполагается, что система ограничений состоит из уравнений и естественных условий неотрицательности переменных. Однако, при составлении математических моделей экономических задач ограничения в основном формулируются системы неравенств, поэтому возникает необходимость перехода от системы неравенств к системе уравнений. Это может быть сделано следующим образом. К левой части линейного неравенства:
![]()
прибавляется величина
![]() ,
такая, что переводит неравенство в
равенство
,
такая, что переводит неравенство в
равенство![]() ,
где:
,
где:
![]() .
.
Неотрицательная
переменная
![]() называетсядополнительнойпеременной.
называетсядополнительнойпеременной.
Основания для возможности такого преобразования дает следующая теорема.
Теорема.Каждому решению
![]() неравенства
неравенства
![]()
соответствует единственное решение
![]() уравнения:
уравнения:
![]()
и неравенства
![]() ,
и, наоборот, каждому решению
,
и, наоборот, каждому решению![]() уравнения:
уравнения:
![]()
и неравенства
![]() соответствует единственное решение
соответствует единственное решение![]() неравенства:
неравенства:
![]() .
.
Доказательство.Пусть![]() – решение неравенства
– решение неравенства![]() .
Тогда:
.
Тогда:
![]() или
или![]()
Если в
уравнение
![]() вместо переменных подставить значения
вместо переменных подставить значения![]() =
=![]() ,
получится:
,
получится:
![]()
![]()
Таким
образом, решение
![]() удовлетворяет уравнению:
удовлетворяет уравнению:
![]() и неравенству
и неравенству![]() .
.
Доказана первая часть теоремы.
Пусть
![]() удовлетворяет уравнению
удовлетворяет уравнению![]() и неравенству
и неравенству![]() ,
т.е.
,
т.е.![]() и
и![]() .
Отбрасывая в левой части равенства
неотрицательную величину
.
Отбрасывая в левой части равенства
неотрицательную величину![]() ,
получим:
,
получим:
![]() ,
,
т.е.
![]() удовлетворяет неравенству:
удовлетворяет неравенству:
![]() ,
,
что и требовалось доказать.
Если в
левую часть неравенств системы ограничений
вида
 ,
,![]() добавить переменную
добавить переменную![]() ,
,![]() ,
то получится система ограничений –
уравнений
,
то получится система ограничений –
уравнений ,
,![]() .
В случае, если система неравенств–ограничений
имеет вид
.
В случае, если система неравенств–ограничений
имеет вид ,
,![]() ,
то из левой части неравенств–ограничений
нужно вычесть соответствующую
неотрицательную дополнительную
переменную
,
то из левой части неравенств–ограничений
нужно вычесть соответствующую
неотрицательную дополнительную
переменную ,
,![]() .
.
Полученная
таким образом система уравнений–ограничений,
вместе с условиями неотрицательности
переменных, т.е.
![]() ,
,![]() и целевой функцией является канонической
формой записи задачи линейного
программирования.
и целевой функцией является канонической
формой записи задачи линейного
программирования.
Дополнительные переменные вводятся в целевую функцию с нулевыми коэффициентами и поэтому не влияют на ее значения.
В
реальных практических задачах
дополнительные неизвестные имеют
определенный смысл. Например, если левая
часть ограничений задачи отражает
расход ресурсов на производство продукции
в объемах
![]() ,
,![]() ,
а правые части - наличие производственных
ресурсов, то числовые значения
дополнительных неизвестных
,
а правые части - наличие производственных
ресурсов, то числовые значения
дополнительных неизвестных![]() ,
,![]() означают объем неиспользованных ресурсов
означают объем неиспользованных ресурсов![]() -го
вида.
-го
вида.
Иногда возникает также необходимость перейти в задаче от нахождения минимума к нахождению максимума или наоборот. Для этого достаточно изменить знаки всех коэффициентов целевой функции на противоположные, а в остальном задачу оставить без изменения. Оптимальные решения полученных таким образом задач на максимум и минимум совпадают, а значения целевых функций при оптимальных решениях отличаются только знаком.