

§7. Обратная матрица
Пусть А – квадратная матрица n-го порядка, а Е – единичная матрица того же порядка.
Матрица В называется обратной по отношению к матрице А, если АВ=ВА=Е.
Теорема. Всякая матрица с отличным от нуля определителем (т.н. невырожденная матрица) имеет обратную и притом единственную.
Доказательство. Вычислим алгебраические дополнения Aij всех n2 элементов матрицы А, составим из них новую матрицу и транспонируем её. Получим т.н. союзную матрицу:
 .
.
Рассмотрим
произведение матриц
А∙А*=(сij).
Его элементы вычисляются по формуле
![]() .
Если i=j,
то эта сумма равна определителю ∆=det(A)
(по
определению), если же
i≠j,
то она равна 0
(по свойству 9). Итак, матрица А∙А*
имеет вид
.
Если i=j,
то эта сумма равна определителю ∆=det(A)
(по
определению), если же
i≠j,
то она равна 0
(по свойству 9). Итак, матрица А∙А*
имеет вид
 =∆∙Е.
=∆∙Е.
Но тогда
![]() .
Аналогично можно показать, что иА*А=∆·Е
и
.
Аналогично можно показать, что иА*А=∆·Е
и
![]() .Все
это означает, что матрица
.Все
это означает, что матрица![]() и есть обратная матрица по отношению к
матрицеА.
и есть обратная матрица по отношению к
матрицеА.
Докажем единственность. Пусть существует еще одна матрица С (кроме построенной выше В) такая, что СА=АС=Е. Тогда: С=СЕ=С(АВ)=(СА)В=ЕВ=В, т.е. С совпадает с матрицей В. Теорема доказана.
Замечание. Матрицу обратную к матрице А, принято обозначать символом А-1. В силу одного из свойств определителей.
![]()
Пример. Найти матрицу, обратную к данной
 .
.
Решение. Убедимся, что матрица А невырожденная: Δ=а11∙A11=1∙(3∙5–3∙4)=3≠0. Находим алгебраические дополнения элементов матрицы А:







Составляем союзную матрицу
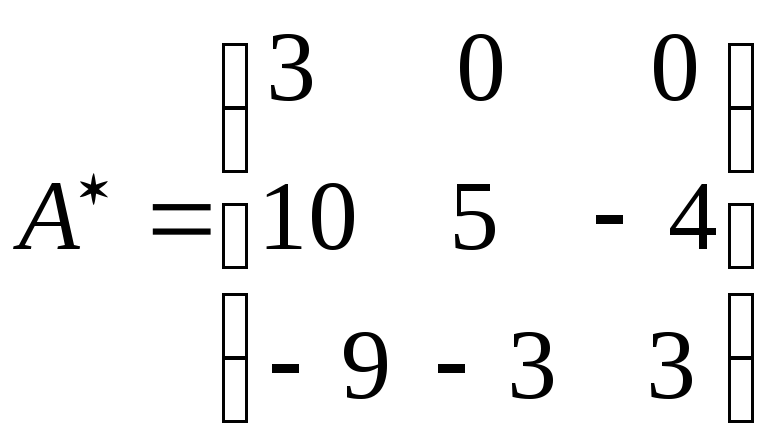 .
.
Находим обратную матрицу
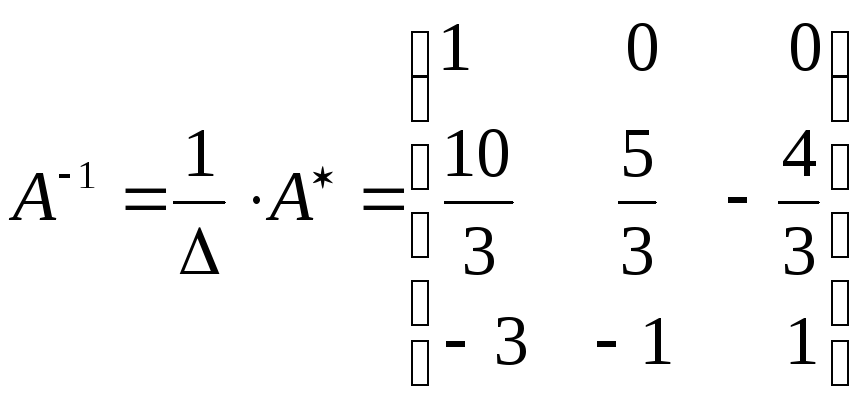 .
.
ЛЕКЦИЯ 3
Тема Системы линейных уравнений
§1. Основные определения
В общем случае система m линейных уравнений с n неизвестными имеет следующий вид:
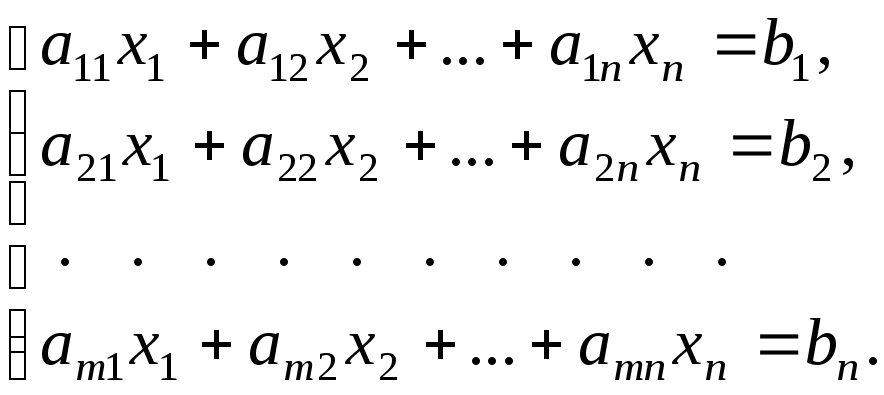 (1)
(1)
При этом через x1, x2,…, xn обозначены неизвестные, подлежащие определению, причем, их число n, не предполагается обязательно равным числу уравнений m. Величины a11, a12,…, amn , называемые коэффициентами системы, и величины b1, b2,…, bn, называемые свободными членами, предполагаются известными.
Решением системы (1) называется такая совокупность n чисел c1, c2,…, cn , что каждое из уравнений (1) обращаются в верное числовое равенство после замены в нем неизвестных xi соответствующими числами ci , i=1,2,…,n.
Система уравнений называется совместной, если она имеет, по крайней мере, одно решение, и несовместной, если у нее не существует ни одного решения.
Например, система
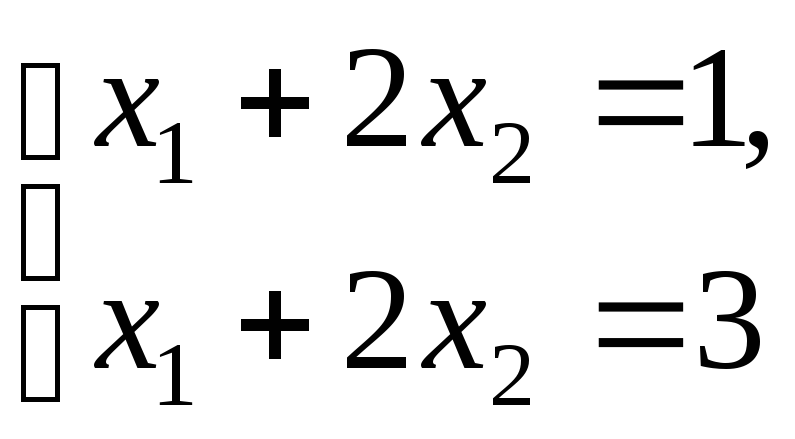
является несовместной, ибо в противном случае мы получили бы, что 1=3.
Решить систему уравнений означает найти все её решения или доказать, что она несовместна.
Два решения совместной системы с1, с2, …, сn и d1, d2, …, dn называют-
ся различными, если нарушается хотя бы одно из равенств с1=d1, c2=d2, …
…, cn=dn.
Совместная система уравнений называется определенной, если она имеет единственное решение, и неопределенной, если у нее существуют, по крайней мере, два различных решения.
Система уравнений называется однородной, если свободные члены всех её уравнений равны нулю.
Очевидно, однородная система всегда совместна, ибо обладает решением x1=0, x2=0,…, xn=0 (т.н. тривиальное решение).
Можно доказать, что, если система уравнений имеет два различных решения, то она имеет бесконечное множество решений.
Справедливость этого наглядно проявляется в случае системы двух уравнений с двумя неизвестными:
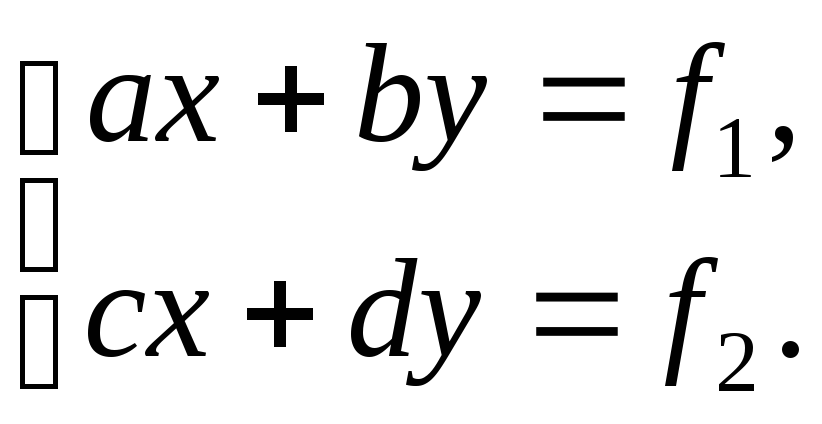 (2)
(2)
Каждое уравнение системы (2) определяет на плоскости Oxy некоторую прямую. Решение системы (2) – это координаты общей точки двух прямых. Но у двух прямых может не существовать общих точек, быть только одна общая точка или бесконечно много общих точек ( если прямые совпадают ).
Две системы линейных уравнений называются эквивалентными (равносильными), если они или обе несовместимы, или же обе совместны и обладают одними и теми же решениями.