

IV Полярная система координат
Рассмотренная выше ДПСК является наиболее употребительной. Однако, при решении некоторых задач могут оказаться более удобными и другие системы. Одной их таких СК на плоскости является так называемая полярная СК.
Полярная система координат определяется заданием некоторой точки О (называемой полюсом), луча, исходящего их этой точки (называемого полярной осью) и единичного отрезка для измерения длин. Кроме того, необходимо указать, какие повороты вокруг точки О считаются положительными. Обычно считаются положительными повороты, совершаемые против часовой стрелки.
Пусть М – произвольная точка плоскости, на которой задана ПСК. Обозначим через ρ расстояние d(O,M) и через φ – угол, на который
нужно повернуть полярную ось для совмещения ее с лучом ОМ. Угол φ будем понимать так, как это принято в тригонометрии, т.е. с точностью до слагаемого вида ±2nπ.
Полярными координатами точки М называются ρ и φ. При этом число ρ называется полярным радиусом точки М, а число φ – полярным углом. Чтобы избежать неоднозначности будем рассматривать только так называемое главное значение угла φ, т.е. значение, удовлетворяющее соотношению –π<φ≤π или 0≤φ<2π. Тогда каждая точка плоскости характеризуется вполне определенной парой чисел (ρ,φ). Исключение составляет полюс: его полярный угол не имеет определенного значения (полярный радиус равен нулю).
В случаях, когда приходится одновременно
пользоваться и декартовой и полярной
системами, возникает необходимость в
формулах перехода от одной к другой. В
частном
случаях, когда приходится одновременно
пользоваться и декартовой и полярной
системами, возникает необходимость в
формулах перехода от одной к другой. В
частном
случае, когда полюс ПСК совпадает
с началом координат ДПСК, полярная
ось совпадает с положительной полуосью
абсцисс, эти формулы имеют вид
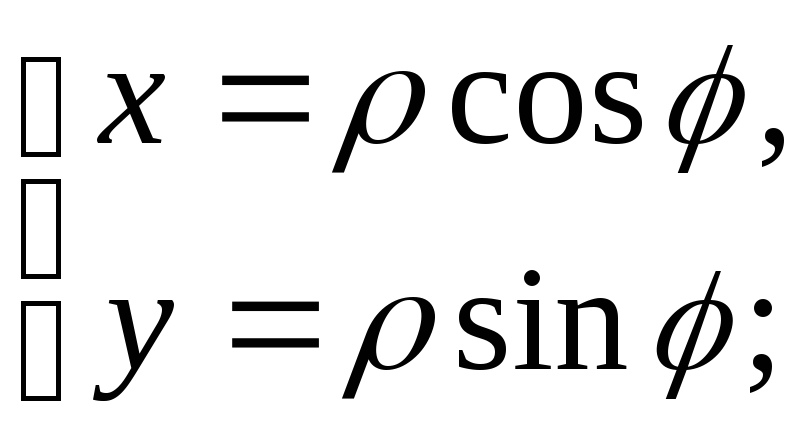

Заметим, что последняя формула для определения значения φ требует знания, в какой четверти находится точка.
§3. Векторы: основные определения
Некоторые физические величины, такие как скорость, ускорение, сила, характеризуются не только числовым значением, но и направлением. Они называются векторными величинами. Математической моделью такой величины служит вектор.
Вектором называют направленный отрезок, т.е. отрезок, для которого указано, какая из ограничивающих его точек считается началом, а какая концом.
На чертежах векторы
обозначаются в виде стрелки
→.
В тексте вектор записывается либо двумя
большими буквами с общей чертой наверху
![]() (первая из них – это начало, а вторая –
конец), либо одной малой буквой с чертой
(первая из них – это начало, а вторая –
конец), либо одной малой буквой с чертой![]() ,
либо малой буквой полужирного шрифтаa
.
,
либо малой буквой полужирного шрифтаa
.
Длиной вектора
или модулем называется длина отрезка
изображающего вектор. Обозначение
![]() ,
,![]() иногдаАВ.
иногдаАВ.
Вектор, длина
которого равна нулю (т.е. конец совпадает
с началом) называется нулевым:
![]() . Направление нулевого вектора следует
считать вполне неопределенным. (нулевой
вектор можно считать перпендикулярным
любому вектору и коллинеарным любому
вектору).
. Направление нулевого вектора следует
считать вполне неопределенным. (нулевой
вектор можно считать перпендикулярным
любому вектору и коллинеарным любому
вектору).
Единичным вектором, или ортом, называют вектор, длина которого равна 1.
Векторы, лежащие
на одной прямой, или на параллельных
прямых, называются коллинеарными.
Обозначение :
![]() |
|
|
|![]() .
Коллинеарные
векторы, направленные в одну сторону,
называются одинаково направленными, а
направленные в противоположные стороны
– противоположно-направленными.
Обозначения:
.
Коллинеарные
векторы, направленные в одну сторону,
называются одинаково направленными, а
направленные в противоположные стороны
– противоположно-направленными.
Обозначения:
![]() ,
,
![]() .
.
Векторы
![]() и
и![]() называют равными и пишут
называют равными и пишут
![]() ,
если: 1)
,
если: 1)
![]() (имеют равные длины);
2)
(имеют равные длины);
2)
![]() (одинаково направлены).
(одинаково направлены).
Такое определение равенства векторов означает, что векторы рассматривают с точностью до их положения на плоскости, в пространстве, т.е. не различая векторов, получающихся друг из друга параллельным переносом. В этом смысле векторы называют свободными. Точка приложения вектора – его начало – может быть выбрана произвольным образом.
Три вектора называются компланарными, если лежат в одной плоскости, или в параллельных плоскостях. В противном случае они называются некомпланарными.
Нетрудно доказать такие утверждения:
1. Если
![]() |
|
|
|![]() , то
, то
![]() ,
,![]() ,
,![]() – компланарные (для любого
– компланарные (для любого![]() ).
).
2. Векторы
![]() и
и![]() коллинеарные;
коллинеарные;![]() ,
,![]() ,
,![]() ,
– компланарные (для любых
,
– компланарные (для любых![]() и
и![]() ).
).
3. Если
![]() ,
,![]() ,
,![]() некомпланарные, то любые два из них
некол- линеарные.
некомпланарные, то любые два из них
некол- линеарные.