

51. Задача Лагранжа. Синтез оптимальных систем.
Постановки задач. Важным этапом в историй естествознания явилось сочинение Жозефа Луи Лагранжа «Аналитическая механика», опубликованное в 1788 г. В частности, трактат Лагранжа сыграл исключительную роль и в развитии вариационного исчисления. Вариационными задачи на условный экстремум (связанный экстремум) называются задачи, в которых требуется найти кривые, доставляющие экстремум функционалу, при этом помимо граничных условий они должны удовлетворять некоторым связям (условиям). Например, эти кривые должны иметь заданную длину (изопериметрическая задача) либо удовлетворять некоторой заданной системе дифференциальных уравнений (задача Лагранжа), либо лежать на некоторой поверхности.
В 1759 году появилась первая работа Лагранжа по вариационному исчислению. Лагранж развил идею Эйлера для случая, когда экстремали xi(t) функционала
 (4.1)
(4.1)
должны удовлетворять
на ряду с граничными условиями
 еще дополнительным связям в виде
дифференциальных уравнений:
еще дополнительным связям в виде
дифференциальных уравнений:
 (4.2)
(4.2)
Эти уравнения получаются из описания динамики объекта управления.
Задача с дополнительными дифференциальными (или голономными) связями называется общей задачей Лагранжа по определению условного экстремума функционала.
Для решения этой задачи составляется вспомогательная функция:
 .
(4.3)
.
(4.3)
Или в сокращенном виде:
 ,
(4.4)
,
(4.4)
где F– подынтегральная функция критерия (функционала) (4.1) или (3.1),
fi– дифференциальные уравнения связи (4.2),
 - некоторые
дополнительные функции (множители
Лагранжа), подлежащие определению.
- некоторые
дополнительные функции (множители
Лагранжа), подлежащие определению.
На основе
вспомогательной функции
 составляется вспомогательный функционал:
составляется вспомогательный функционал:
 (4.5)
(4.5)
Этот функционал,
зависящий от "n” функций xi(t) и от “n”
функций
 ,
исследуется на безусловный экстремум,
так как благодаря введению функции
,
исследуется на безусловный экстремум,
так как благодаря введению функции все функции хi могут варьироваться
независимо. В результате получаем задачу
Эйлера.
все функции хi могут варьироваться
независимо. В результате получаем задачу
Эйлера.
Для функционала (4.5) записываем “n” уравнений названных уравнениями Эйлера-Лагранжа:
 (4.6)
(4.6)
или подставляя
из(4.4) выражение для
 ,
получим:
,
получим:
 .
(4.7)
.
(4.7)
Эти уравнения совместно с уравнениями (4.2) образуют систему из 2nуравнений с 2nнеизвестными, т.е. задача имеет решение. При этом постоянные интегрирования определяются из граничных условий.
Рассмотрим решение общей задачи Лагранжа для объекта второго порядка:
 . (4.8)
. (4.8)
Запишем уравнение динамики объекта в фазовых переменных (координатах):
x1=qз-y; .
.
Исходя из (4.8) получаем:
 ,
(4.9)
,
(4.9)
где а21= .
.
Граничные условия:
x1(tн)=х1н; х2(tк)=х2н=0 (y=qз); х1(tк)=х1к=0;x2(tк)=х2к=0.
Задан квадратичный интегральный критерий оптимальности:
 (4.10)
(4.10)
Требуется определить оптимальный в смысле критерия (4.10) закон изменения управляющего воздействия uопт(t), при котором объект из начального состояния х1н, х2нпереводится в конечное состояние х1к, х2к(оптимальное программное управление) и оптимальный регуляторuопт(х1, х2) для замкнутой САУ.
Принимая во внимание (4.1) и (4.9) запишем выражения для вспомогательного функционала:
 .
(4.11)
.
(4.11)
Следующим этапом является получение системы уравнений Эйлера-Лагранжа (4.7)
Для объекта второго порядка (i=1,2) они будут иметь вид:
 (4.12)
(4.12)
Определим, что:

Очевидно, что:
 .
.
Аналогично:

Подставляя значения частных производных в уравнения (4.12) получим:
 (4.13)
(4.13)
Оптимальное значение управляющего воздействия должно доставлять минимальное значение функционалам JиJ*. Поэтому должно выполняться условие, что
 (4.14)
(4.14)
Подставляя в (4.14) выражение (4.11), получим:
 (4.15)
(4.15)
Следовательно
 (4.16)
(4.16)
Таким образом,
чтобы определить оптимальный закон
управления uопт(t),
нужно определить из системы дифференциальных
уравнений (4.14) и уравнений динамики
объекта (4.9) выражение для с учетом выражения (4.16) получим:
с учетом выражения (4.16) получим:
 (4.17)
(4.17)
Характеристическое уравнение системы (4.17):
р4 - 2Вр2+с=0, (4.18)
где В= ,
,
Корни уравнения (4.18) будут:
 (4.19)
(4.19)
Общим решением уравнения (4.17) будет:
 .
(4.20)
.
(4.20)
Из начальных условий следует, что слагаемые в (4.20) с положительными корнями р1и р3равны нулю, т.е. с1=0 и с3=0. Таким образом:
 (4.21)
(4.21)
Аналогично:
 (4.22)
(4.22)
Значения постоянных интегрирования с2, с4,с6, с8– определяются из граничных условий. Подставив (4.22) в (4.16) получим закон изменения управляющего воздействия для оптимального программного регулятора:
 ,
(4.33)
,
(4.33)
где
 ;
; .
.
Для определения
закона оптимального управления для
замкнутой САУ необходимо найти зависимость
управляющего воздействия от переменных
состояний объекта uопт(x1,x2).
Для этого выразим производную через переменные состояния объекта.
Для этого возьмем первую и вторую
производные от х1(t),
определяемую выражением (4.21). В результате
получим, что:
через переменные состояния объекта.
Для этого возьмем первую и вторую
производные от х1(t),
определяемую выражением (4.21). В результате
получим, что:
 (4.24)
(4.24)
Подставив выражение (4.24) во второе уравнение системы (4.17) получим:
uопт=-к1х1-к2х2(4.25)
где к1=р2р4+а21; к2=р2+р4+а22 (4.26)
Значения р2и р4 определяются выражением (4.19).
Таким образом получаем замкнутую систему с ПД регулятором, коэффициенты которого определяются соотношением (4.26) (см.рис. 4.1)

Рис. 4.1. Замкнутая система управления с оптимальным по критерию (4.10)
с ПД регулятором.
Если представить модель объекта управления в переменных состояния (4.9), то структурная схема САУ будет иметь вид, представленный на рис. 4.2. В этом случае ПД-регулятор превращается в регулятор состояния объекта.
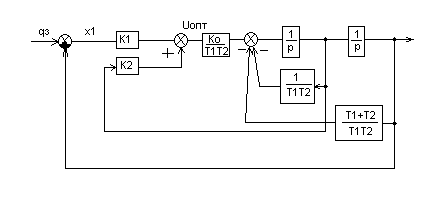
Рис. 4.2 Замкнутая система управления с оптимальным по критерию (4.10)
с регулятором состояния.
Оба регулятора дают один и тот же результат. Схема с регулятором состояния имеет то преимущество, что не надо производить операцию дифференцирования. Но применение этой схемы возможно, если х2- измеряемое, а иначе надо использовать наблюдатель состояния объекта.