

31 Расчет оптимальных параметров регулятора по уравнениям Риккати.
В инженерной практике часто ставится задача определения оптимальных значений параметров системы, структура и дифференциальные уравнения которой заданы Такая задача обычно решается при расчете параметров оптимальной настройки регуляторов. При этом могут быть использованы уравнения Эйлера-Лагранжа (или Эйлера-Пуассона), уравнения Риккати, а также частотные методы и др
Математически задачу определения параметров оптимальной настройки системы можно сформулировать следующим образом: заданы дифференциальные уравнения состояния системы
![]() (3.186)
(3.186)
 матрица,
элементы которой зависят от искомых
параметров настройки системы (kij>0,aij,bij– коэффициенты уравнения объекта);X,u– векторы координат
состояния и управлений;
матрица,
элементы которой зависят от искомых
параметров настройки системы (kij>0,aij,bij– коэффициенты уравнения объекта);X,u– векторы координат
состояния и управлений;
Требуется определить оптимальные значения параметров системы из условий экстремума выбранного критерия качества.
В ряде практических задач коэффициенты aij,bijзаданы и требуется определить коэффициентыkij.
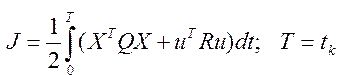
Если рассматривается
критерий качества в виде интеграла
с квадратичной подинтегральной
функцией![]() ,
то для определения искомыхkij
можно использовать уравнения
вариационной задачи или Риккати.
,
то для определения искомыхkij
можно использовать уравнения
вариационной задачи или Риккати.
Расчет по уравнениям Риккати. Матрицу оптимальных параметров регулятора . с можно определить по заданным уравнениям состояния (3.186) с использованием матричного уравнения Риккати. основываясь на методе принципа максимума Для линейных объектов уравнение (3.114) можно записать в виде (3.186), а минимизируемый квадратичный функционал в общем случае представить в виде
 (3.194)
(3.194)
Где Q={qij}nxnи R={rlk}rxr– матрицы элементы которыхqij>0 иrlk>0
Известно, что вектор координат оптимальных управлений, доставляющих минимум интегралу 3.194 является линейной функцией координат состояния 3.186.
Функция гаамильтона в данном случае при ψ0 =-1 будет иметь вид
![]() (3.195)
(3.195)
При оптимальном управлении
 или
или

Откуда оптимальное управление
![]() (3.196)
(3.196)
Управление 3.196 обеспечивает максимум Гамильтониана 3.195, так как при положительно определенной матрице R
Используя 3.195 и 3.196 запишем канонические уравнения
 (3.197)
(3.197)
Для оптимального управления 3.196 необходимо из уравнений 3.197 найти вектор вспомогательных функций Wс помощью уравнения Риккати:
![]() (3.198)
(3.198)
Дифференцируя которое, найдем
![]() (3.199)
(3.199)
Где K(t) – матрица неизвестных коэффициентов размерностиnxn
![]()
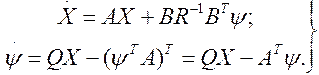
Подставив 3.198 в уравнения системы 3.197 получим
 (3.200)
(3.200)
Если подставить в 3.199 вместо X’ первое уравнение системы 3.200 то запишем:
![]() (3.202)
(3.202)
Называемое уравнением Риккати. Решение уравнения 3.202 определяет матрицу K(t), подставляя в которую 3.198 и учитывая 3.196 получим выражение для оптимального управления
![]() (3.203)
(3.203)
Для полносью
управляемых объектов с постоянными во
времени параметрами при tk=T=бесконечности
(см.3.194)K’(t)=0
и![]() ,
поэтому оптмальное управление принимает
форму
,
поэтому оптмальное управление принимает
форму
![]() (3.204)
(3.204)
Откуда
![]() (3.205)
(3.205)
Где
![]() - положительно определенная симметричная
матрица размерностиnxn,
состоящяя из постоянных коэффициентовkij>=0, определяемая
уравнение 3.202 с учетом
- положительно определенная симметричная
матрица размерностиnxn,
состоящяя из постоянных коэффициентовkij>=0, определяемая
уравнение 3.202 с учетом![]()
 (3.206)
(3.206)
Оптимальное управление (3 204) минимизирует квадратичный функционал (3.194) для объектов с постоянными параметрами и tk=T=бесконечности.
Таким образом, для определения оптимальных параметров регулятора необходимо найти матрицу К(с шапочкой) и подставить в (3.205). Для объектов с переменными параметрами, а также с постоянными параметрами при конечной величине tk=Tнеобходимо определять матрицу K(t). Основная трудность решения такой задачи состоит в том. что уравнение (3.202) является нелинейным дифференциальным матричным уравнением, для интегрирования которого требуется применение вычислительных машин. В этом случае регулятор будет иметь переменные параметры, т.е Кос(t)