

27. 64 Принцип оптимальности.
В общем виде этот принцип можно сформулировать следующим образом: оптимальная стратегия (поведение) обладает тем свойством, что, каковы бы ни были начальное состояние и решения на начальном этапе, решения на последующем этапе должны составлять оптимальную стратегию относительно состояния, которое получается в результате принятия решений на начальном этапе.
БЕЛЛМАНА ПРИНЦИП ОПТИМАЛЬНОСТИ [Bellman’s optimality principle] — важнейшее положение динамического программирования, которое гласит: оптимальное поведение в задачах динамического программирования обладает тем свойством, что каковы бы ни были первоначальное состояние и решение (т. е. “управление”), последующие решения должны составлять оптимальное поведение относительно состояния, получающегося в результате первого решения. Этот принцип можно выразить и рассуждая от противного: если не использовать наилучшим образом то, чем мы располагаем сейчас, то и в дальнейшем не удастся наилучшим образом распорядиться тем, что мы могли бы иметь.
Следовательно, если имеется оптимальная траектория, то и любой ее участок представляет собой оптимальную траекторию. Этот принцип позволяет сформулировать эффективный метод решения широкого класса многошаговых задач.
29. Постановка задачи аналитического конструирования регулятора.
Задача синтеза для линейных объектов управления, минимизирующего квадратичный критерий, называется задачей об аналитическом конструировании регуляторов. В этом случае оптимальный закон управления является линейным.
Таким образом, задачу об аналитическом конструировании регуляторов можно рассматривать как метод синтеза линейных систем.
Рассмотрим уравнение:

полагая, что матрицы А, В и вектор х имеют вид
и — скалярное управление. Требуется найти управление, минимизирующее функционал

где матрица

r,q1,q2 — положительные числа.
Матрицу К, с помощью которой задается функция S(х), представим в виде
Запишем уравнение Риккати для данного случая:
 (2.1)
(2.1)

 ,
(2.2)
,
(2.2)
Из уравнения (2.2) следует система уравнений
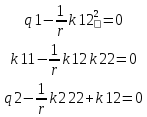 (2.3)
(2.3)
Система уравнений (2.3) имеет следующие решения:
 ,
,
 (2.4)
(2.4)
Выделим из (2.4) решение, соответствующее положительно определенной матрице К.
Применяя критерий Сильвестра: для того чтобы симметричная матрица R была положительно определенной, необходимо и достаточно, чтобы все ее ведущие главные миноры были положительны. Ведущим главным минором порядка к называют определитель, составленный из элементов матрицы R, стоящих на пересечении первых к строк и первых к столбцов.
найдем, что таким решением являются
 ,
, ,
,
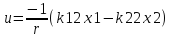
Пусть К — положительно определенная матрица, являющаяся решением уравнения (1),
Оптимальное управление задается равенством
 (2.55)
(2.55)
В соответствии с (2.55), оптимальное управление
30. Задача а. М. Лётова
Задача А. М. Лётова - получено аналитическое решение задачи об оптимальной стабилизации линейных стационарных объектов при квадратичном функционале качества. Это направление получило название аналитического конструирования регуляторов.
Процедура аналитического конструирования регуляторов (процедура АКОР) состоит из трех операций: 1) решение уравнения Риккати, 2) выделение из всего множества этих решений матрицы P0>0, 3) вычисление искомой матрицы коэффициентов усиления регулятора по формуле
С=- P0B
C- матрица,P-симметричная матрица чисел размеровnxn
матричное уравнение Риккати:

![]()
А и В заданные матрицы чисел размерности nxnиnxmсоответственно