

Лекция 33
СПОСОБЫ КОНКРЕТНОГО РАСЧЕТА ФИЗИЧЕСКИ НЕЛИНЕЙНЫХ БАЛОК
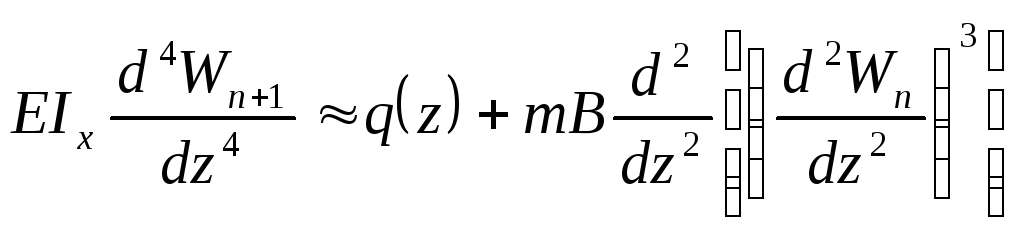
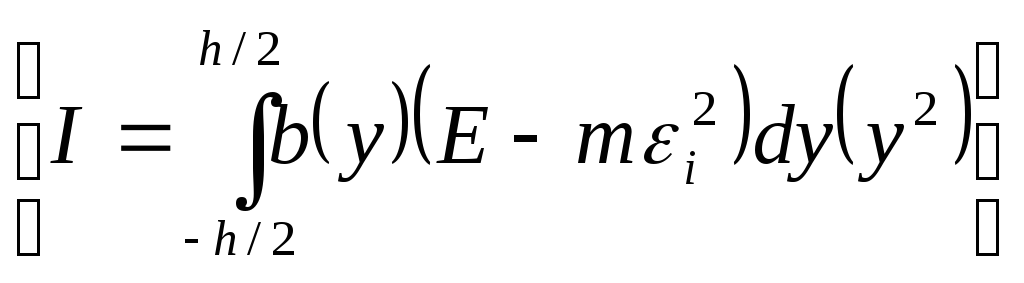
Укажем один из способов решения уравнения изгиба физически-нелинейной балки:
 (1)
-обыкновенное нелинейное дифференциальное
уравнение (т.к. во второе слагаемое
входит В3)
(1)
-обыкновенное нелинейное дифференциальное
уравнение (т.к. во второе слагаемое
входит В3)
E, m- постоянные
![]() (3)-кубическая
парабола
(3)-кубическая
парабола
![]() ,
,
![]()
(1)- уравнение равновесия элементарной части балки.
Для задания конкретной задачи необходимо задать внешнюю нагрузку на балку и условие закрепления.
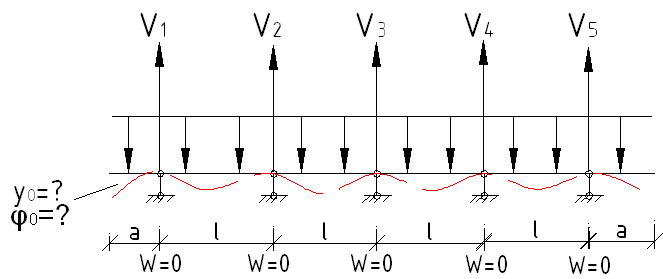
Граничные условия:
М(0)=0
![]()
Q(0)=0
![]()
четыре граничных условия, полностью определяющих балку.
В задаче 7 неизвестных.
Для их нахождения используются условия:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Из
решения замкнутой системы уравнений
получаем величины семи неизвестных:
![]()
Тогда:
![]() (выражение для функции прогиба данной
балки)
(выражение для функции прогиба данной
балки)
Для уравнения (1) предполагается, что:
![]() (2)
(2)
Методы решения задачи:
1)Алгебраизация изгиба физически-нелинейной балки методом Бубнова-Галеркина.
Выражение (2) является приближенным выражением для функции прогиба.
При решении физически-нелинейной задачи с нелинейной связью напряжения-деформации (3) вид у(z) должен меняться.
Т.к. в строительных конструкциях допускаются небольшие пластические деформации, то на данном уровне деформирования считаем, что будет можно ввести коэффициент А уравнения (2)

РАСЧЕТ ФИЗИЧЕСКИ НЕЛИНЕЙНЫХ БАЛОК МЕТОДОМ БУБНОВА-ГАЛЕРКИНА
Используем алгебраизацию по методу Бубнова-Галеркина применительно к уравнению (1):
![]()
![]() (4)
(4)
Подставляем
(4) в (1):
![]() -
в силу приближенности выражения (4)
-
в силу приближенности выражения (4)
Используем принцип Лагранжа:
Сумма работ системы всех внешних и внутренних сил на любом возможном и весьма малом перемещении равно нулю (обобщение принципа Лагранжа на физически-нелинейные системы).
![]() -
вариация прогиба балки.
-
вариация прогиба балки.
![]() (5)
(5)
Определенные интегралы от конкретных функций представляют собой числа, следовательно, после вычисления интегралов в (5) получаем:
![]() (6)
(6)
![]()
![]()
Таким образом, от дифференциального нелинейного уравнения мы пришли к нелинейному алгебраическом уравнению (6).
РАСЧЕТ ФИЗИЧЕСКИ НЕЛИНЕЙНЫХ БАЛОК МЕТОДОМ КОНЧНЫХ РАЗНОСТЕЙ
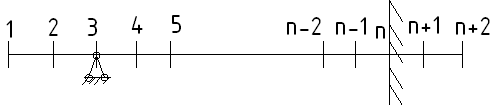
Проводим алгебраизацию дифференциального уравнения (1) и граничных условий методом конечных разностей.

Для реализации метода конечных разностей по длине балки вводим сеть равноотстоящих узлов.

Для производных используем обычные формулы:
![]()
![]()
![]()
![]()
Тогда дифференциальное уравнении (1) и граничные условия записываются в виде системы линейных алгебраических уравнений.
![]()
![]()
![]()
![]()
При числе участков разбиения длины балки порядка1000 обеспечивается точность вычислений по всем функциям порядка 0,1%, т.е. с помощью метода конечных разностей можно получить достоверные и весьма точные решения задач изгиба физически нелинейных балок.
Методы решения нелинейных дифференциальных уравнений
Практически реализуем следующий путь решения задачи:
1.предварительно привести уравнение к алгебраическому виду
2.решать данные алгебраические уравнения известными методами.
Рассмотрим метод простой итерации:
![]() -
нелинейное алгебраическое уравнение
-
нелинейное алгебраическое уравнение
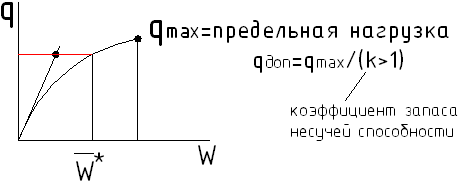
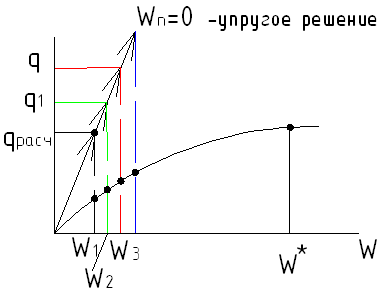
Задача: построить нелинейную характеристику.
С ростом нагрузки интенсивность роста прогиба увеличивается
Рис.1
![]()
Наметим путь решения задачи:
![]()
![]() -
итерационная формула связи между
предыдущим и последним значением А до
сходимости (n=0,1,2,…)
-
итерационная формула связи между
предыдущим и последним значением А до
сходимости (n=0,1,2,…)
![]()
![]() -
решение упругой задачи;
-
решение упругой задачи;
![]()
![]()
![]()
Доказательство:
Теорема о сходимости данного процесса, которая графически представляется в виде (рис 1)
![]()
Скорость сходимости метода простой итерации невысока.
Метод 2.
Рассмотрим
уравнение:
![]()
Т.к.
при
![]()
![]() ,
то величина А положительна (ищем в
положительной области)
,
то величина А положительна (ищем в
положительной области)
![]()
![]() -
условие перехода величины А через
исходное значение.
-
условие перехода величины А через
исходное значение.
Далее:
![]() -
смена знака шага и сбивания шага
-
смена знака шага и сбивания шага

Данная методика пригодна для линейного алгебраического уравнения любого порядка.
Метод упругих решений А. А. Ильюшина
Применим с любым методом алгебраизации задачи.
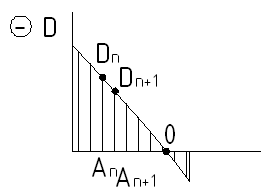
От уравнения (1) переходим к следующей записи:
 ,
n=0,1,2,….
,
n=0,1,2,….
![]()
![]()
Правая часть полностью увеличивается, но разность между точками постоянно убывает
![]()
![]()
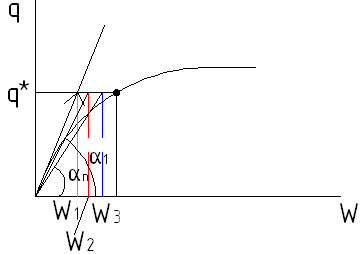
Метод переменных параметров упругости А. Биргера
Процесс сходимости является более быстрым, чем предыдущий. Графически процесс итераций имеет вид
В этом случае дифференциальное уравнение используем в виде:
![]()
При движении к точному решению жесткостные параметры изменяются:
 -
переменная жесткость, зависящая от
уровня деформирования
-
переменная жесткость, зависящая от
уровня деформирования
![]()
При
росте
![]() жесткость уменьшается (т.к. в скобках
второе слагаемое увеличивается)
жесткость уменьшается (т.к. в скобках
второе слагаемое увеличивается)
С учетом этого движение происходит под новым (меньшим) углом и процесс сходится быстрее, чем по методу упругих решений.
Метод Ньютона решения нелинейных алгебраических уравнений.
Предположим, что исходное деформированное уравнение алгебраизировано методом Бубнова-Галеркина или методом конечных разностей.
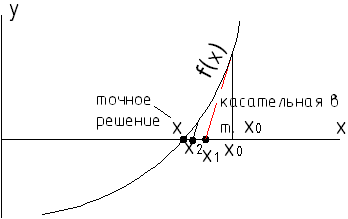
Выбираем начальное приближение к решению Х0
Движения по касательным в точках Хn
![]()
![]()
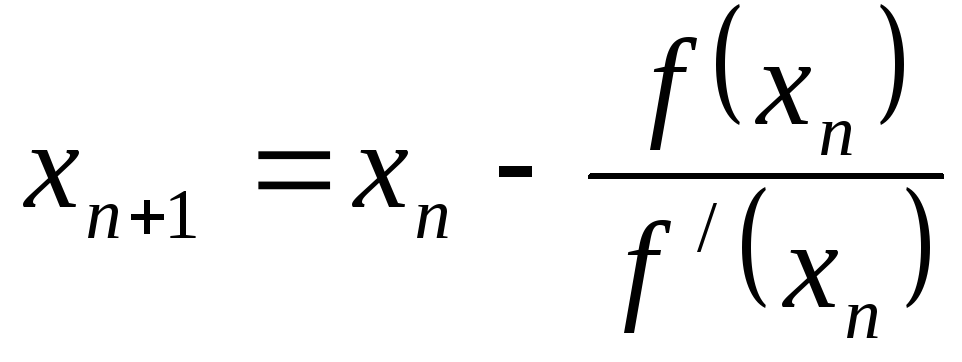 ,
n=0,1,2,…
,
n=0,1,2,…
Скорость сходимости является квадратичной, т.е. очень высокой.
Этот метод применим к решению произвольной системы нелинейных алгебраических уравнений.
Шаговые методы решения нелегких задач. Метод последовательных нагружений.

Рассмотрим алгебраизованный аналог дифференциального уравнения (1)
![]() (8)
(8)
Предположим, что при q=0, А=0- исходное недеформированное нагруженное состояние.
Разбиваем
диапазон
![]() -
на ряд малых степеней нагружени, например,
-
на ряд малых степеней нагружени, например,
![]()
К уравнению (8) принимаем следующие возмущения
![]() следует
приращение значения нагрузки
следует
приращение значения нагрузки
![]()
![]() (9)
-точное выражение для исходного
рассматриваемого состояния.
(9)
-точное выражение для исходного
рассматриваемого состояния.
![]() (*)
(*)
Подставляем (*) в (9)
![]()
![]() (10)
(10)
Из (10) вычтем (9):
![]()
![]()
![]()
Далее повторяем процесс, т.е. получаем значения:
![]() (т.е.
вдоль кривой нагружения)
(т.е.
вдоль кривой нагружения)