

Radzevich, S.P. Monograph - 2001
.pdf190 |
3. Системы координат и линейные преобразования |
|
r M – модуль радиус-вектора r M точки M ; |
||
M – полярный угол радиус-вектора r M |
точки M ; |
|
ψ M – широта положения точки M . |
ψ M 90 и сферические координаты (так же, как и |
|
В задачах, решаемых на |
плоскости, угол |
|
цилиндрические) вырождаются в полярные координаты.
3.7.3. Взаимосвязь между цилиндрическими и сферическими координатами. В текущей точки M на поверхности Д И ее цилиндрические и сферические координаты связаны следующими зависимостями:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
M |
|
|
M 2 |
Z |
M 2 |
M |
|
M |
|
M |
|
|||
r |
|
|
|
; |
|
|
|
; tan |
|
|
|
|
|||
|
|
|
|
|
|
Z |
M |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
и
M r M sin M ; M M ; Z M r M cos M .
3.8.О линейных преобразованиях
Кроме координатного и отображающего преобразований в практике обработки сложных поверхностей деталей на многокоординатных станках с ЧПУ находят применение и другие виды отображений. Если обрабатываемая деталь обладает симметрией (центральной, зеркальной или одновременно центральной и зеркальной), в памяти системы ЧПУ металлорежущим станком достаточно иметь данные, описывающие лишь часть обрабатываемой поверхности Д детали. В этом случае необходимая информация обо всей поверхности Д детали может быть получена при помощи вращений, сдвигов и отображений. Этим достигается более рациональное использование объема памяти системы ЧПУ металлорежущим станком. Выполняемые преобразования симметрии, сдвига, изменения масштаба по осям координат и т.п. являются преобразованиями объектов и не оказывают влияния на систему координат, в которой деталь описана. С такими преобразованеиями можно познакомиться по работам (Faux, I.D., Pratt, M.J., 1987; Marciniak, K, 1991; Mortenson, M.E., 1985). Матричное описание вращений вокруг координатной оси, вокруг оси, произвольным образом ориентированной в пространстве, в т.ч. как проходящей, так и не проходящей через начало координат, достаточно подробно описано в литературе (Люкшин В.С., 1968). Использование матриц для получения проекций геометрических образов на координатные плоскости рассмотрено в (Marciniak, K, 1991).
Гл а в а 4. Геометрия касания поверхности детали
иисходной инструментальной поверхности
Эффективность формообразования поверхностей деталей зависит от множества различных факторов. Для определения наивыгоднейшего значения каждого из факторов и наилучшего сочетания всех факторов вместе взятых требуется информация. Часть необходимой информации содержится в исходных данных – в чертеже детали: это сведения о форме и параметрах обрабатываемых поверхностей, требования к точности их обработки, взаимного расположения и пр. Другая часть информации, необходимая для решения задачи синтеза наивыгоднейшего формообразования поверхности детали, генерируется в процессе разработки технологии изготовления детали, в частности, при подготовке управляющих программ для системы ЧПУ металлорежущим станком. Эту часть информации можно рассматривать как промежуточную – в окончательно разработанном технологическом процессе в явном виде она отсутствует. Дополнительным источником, позволяющим генерировать вторую часть необходимой информации, служит геометрия касания поверхности детали и исходной инструментальной поверхности.
В соответствие с дифференциально-геометрическим методом (Радзевич С.П., 1991) решение задачи синтеза наивыгоднейшего формообразования поверхности детали основано на том, что поверхность Д
является первичной. Чтобы исходя из этого можно было решить задачу определения вида и параметров исходной инструментальной поверхности И наивыгоднейшего инструмента для обработки заданной поверхности детали, а затем синтезировать наивыгоднейшую кинематику формообразования, необходимо аналитически описать геометрию касания поверхности Д детали и ИИП И инструмента в каждый момент
формообразующей обработки.
Характер касания поверхностей Д и И , параметры их локальной топологии и относительная локальная
ориентация определяют эффективность применяемого способа обработки детали. Эффективным средством увеличения производительности и повышения точности формообразования поверхностей деталей гладким регулярным отсеком поверхности И инструмента является управление значениями параметров локальной топологии поверхностей Д и И в точке K их касания, которые определяют геометрию касания этих
поверхностей.
Используются различные аналитические методы описания геометрии касания поверхности детали и исходной инструментальной поверхности в дифференциальной окрестности точки их касания (Радзевич С.П.,
1987).
В процессе формообразования поверхность Д детали и поверхность И инструмента являются
сопряженными: в относительном движении в каждый момент времени они касаются одна другой и имеют не менее одной общей точки – точки K их касания. Если поверхности Д и И касаются одна другой в точке, то
точка К будет единственной (или их множество конечно, когда поверхности Д и И касаются одна другой
одновременно в нескольких точках – такие случаи в практике формообразующей обработки деталей встречаются как исключение). Если же поверхности Д и И касаются одна другой вдоль некоторой линии –
характеристики E , или в пределах некоторого участка поверхности Д , множество точек касания
бесконечно.
Понятие геометрия касания поверхности Д детали и поверхности И инструмента подразумевает как
качественную, так и количественную оценку соотношений элементов их локальной топологии в точке K и охватывает различные подходы к аналитическому описанию полноты прилегания поверхности И к поверхности Д . Для этого используются геометрические образы, обобщающие элементы локальной
топологии обеих поверхностей Д и И и представляющие собой своеобразный комбинированный геометрический образ.

192 |
4. Геометрия касания поверхности детали и исходной инструментальной поверхности |
Интуитивное представление о геометрии касания поверхностей Д и И и о полноте их прилегания одна к другой (т.е. о степени конформности1 исходной инструментальной поверхности И к обрабатываемой поверхности Д детали) можно получить из простого примера. Пусть выпуклая сфера некоторого радиуса
касается:
-другой выпуклой сферы;
-плоскости;
-вогнутой сферы некоторого (большего) радиуса.
Интуиция подсказывает, что в первом случае касающиеся поверхности наименее полно прилегают одна к другой, во втором – больше, а в третьем – еще больше. Степень конформности касающихся поверхностей в первом случае наименьшая, во втором – больше, а в третьем – еще больше.
Чтобы описать аналитически геометрию касания поверхностей Д и И требуется, чтобы обе эти
поверхности были аналитически представлены в некоторой общей системе координат и был образован замкнутый цикл прямого и обратного последовательного преобразования координат.
4.1.Образование замкнутого цикла последовательных преобразований координат
Под замкнутым циклом последовательных преобразований координат понимается такая последовательность их преобразований, при которой к любой из систем координат, входящих в цикл, можно прийти от любой другой системы координат, образующией этот цикл. В этом случае использование формулы (3.16) для всего цикла приведет к тому, что после выполнения всех входящих в цикл преобразований возвращаемся к исходной системе координат. Это необходимый и достаточный признак того, что цикл последовательных преобразований координат является замкнутым.
Введение в рассмотрение замкнутых циклов последовательных преобразований координат дает возможность рассматривать решение задачи синтеза наивыгоднейшего формообразования поверхности детали в любой из систем координат, образующих цикл, в первую очередь в той из них, в которой описание процесса наиболее удобно.
Взамкнутом цикле последовательных преобразований координат можно выделить прямое и обратное направление преобразования координат (рис. 4.1.).
Впрямом цикле (рис. 4.1.1) переход от системы коодинат XдYдZд детали первоначально производится к
локальной подвижной системе координат x K y K z K с началом в точке K касания поверхности Д детали и И инструмента. Такой переход осуществляется либо непосредственно оператором Res Д д , либо (например, когда заданная в своей системе координат XпдYпдZпд поверхность Д представляет собой
совокупность отдельных отсеков, каждый из которых задан в своей системе координат) через некоторые промежуточные системы координат Xпд.iYпд.i Zпд.i каждого из отдельных отсеков поверхости детали.
В обратном цикле последовательных преобразований координат (рис. 4.1.2) переход от системы координат XдYдZд детали первоначально производится в направление подвижной локальной системы
координат xиK yиK zиK с началом в точке K касания поверхности Д детали и И инструмента. Такой
переход описывается совокупностью операторов преобразований координат последовательно от одной к другой.
В замкнутом цикле последовательных преобразований координат составление операторов преобразования одной локальной системы координат xд yдzд в другую xи yи zи описывается, как правило,
проще.
Геометрическая информация о поверхности Д И может быть задана, например, ее уравнением (1.2):
(4.1) |
rд(и) rд(и) |
Uд и ,Vд и , |
Uд и ,Vд и G |
в векторной форме.
1Конформный – от лат. conformis – подобный, соответствующий, сообразный.




 Res
Res  Res
Res  Res
Res  Res
Res 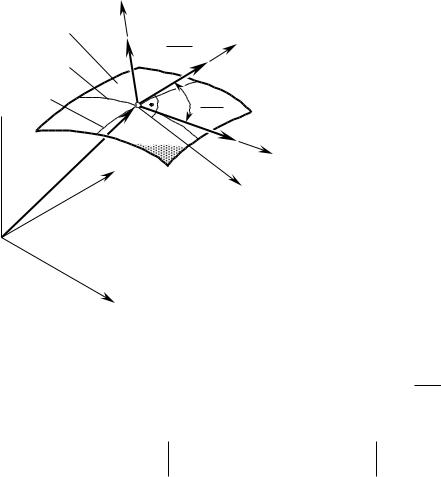

4.1. Образование замкнутого цикла последовательных преобразований координат |
195 |
В системе координат x K y K z K главные направления на поверхности Д находятся как корни квадратного уравнения (4).
При ортогональной |
U |
д |
, V параметризации поверхности Д |
отношение |
dVд |
|
определит величину |
|
|||||||
|
|
д |
|
dUд |
|
||
|
|
|
|
|
|
||
тангенса угла д между ортом t 1.д , касательным к следу главного сечения |
C1.д |
поверхности Д , и |
|||||
Uд линией на ней.
Вслучае неортогональной параметризации поверхности Д угол ωд между осями x1 и y1 локальной
системы координат в общем случае отличен от |
90 , тогда как ось |
z |
|
всегда ортогональна координатной |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
плоскости x1 y1 и, следовательно, каждой из координатных осей x1 и |
y1 . Поэтому система координат x1 y1z1 |
|||||||||||||||||||||||||||||||||||||||
будет “частично” косоугольной. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
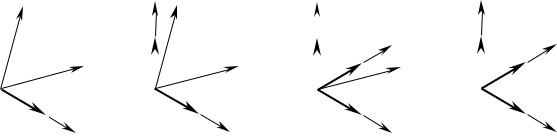
Рассмотрим произвольный исходный не ортогональный и не нормированный базис x1x2 x3 (рис. 4.3.1) и |
||||||||||||||||||||||||||||||||||||||
построим на его основе ортонормированный базис. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
x3 |
|
|
|
|
|
x4 x1 x2 |
|
|
|
x3 |
|
|
|
|
|
|
x4 |
|
|
x5 |
|
x4 x1 |
|
|
x4 |
|
|
|
|
x5 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
x2 |
|
e4 |
|
|
|
|
|
|
x2 |
|
|
e4 |
|
e5 |
|
x2 |
|
|
e4 |
|
|
e5 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
e1 |
|
x1 |
|
|
|
|
e1 |
|
|
x1 |
|
|
|
|
|
|
e1 |
|
x1 |
|
|
|
|
|
e1 |
|
|
|
x1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
1. |
|
|
2. |
|
|
|
|
|
|
|
|
|
3. |
|
|
|
|
|
|
|
4. |
|
|
|
|
||||||
|
|
|
|
Рис. 4.3. Построение ортонормированного базиса e1e4e5 по призвольному x1x2 x3 исходному. |
||||||||||||||||||||||||||||||||||||
|
|
Векторное произведение любых двух из трех x1 , x 2 , x3 векторов, например, |
произведение x1 x 2 , |
|||||||||||||||||||||||||||||||||||||
определяет |
вектор |
x4 |
(рис. 4.3.2), который вследствие |
|
известного |
|
свойства |
|
векторного |
произведения |
||||||||||||||||||||||||||||||
перпендикулярен координатной плоскости x1x2 . |
Затем используем найденный вектор x4 |
и один из двух |
||||||||||||||||||||||||||||||||||||||
исходных x1 |
или x2 , например, вектор |
x2 , и находим |
вектор x5 x 4 x2 (рис. 4.3.3). Найденный базис |
|||||||||||||||||||||||||||||||||||||
x1x4 x5 |
|
будет ортогональным. Чтобы преобразовать его в ортонормированный, разделим каждый из векторов |
||||||||||||||||||||||||||||||||||||||
x |
1 |
, x |
4 |
, |
x |
5 |
на его модуль: e |
|
x1 |
, e |
4 |
|
x4 |
, e |
5 |
|
x5 |
|
. Построенный базис e e |
4 |
e |
5 |
(см. рис. 4.3.4) всегда |
|||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
x1 |
|
|
x4 |
|
|
x5 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||||||
будет ортонормированным. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
Принимаем во внимание, |
|
что ось |
z1 (см. рис. 4.2) |
|
перпендикулярна координатной плоскости x1 y1 . |
|||||||||||||||||||||||||||||||||
Строим ортогональную подвижную локальную систему координат x K y K z K |
с началом в произвольной |
|||||||||||||||||||||||||||||||||||||||
точке M на поверхности |
Д . Пусть ось x K совпадает с осью x (т.е. |
x K x ); ось |
z K совпадает с осью |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
z K |
|
|
|
y K |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||
z |
|
(т.е. |
|
|
z ); |
а ось |
построена таким образом, |
что она перпендикулярна координатной плоскости |
||||||||||||||||||||||||||||||||
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x K z K . Для этого достаточно орт j K |
оси y K |
определить как векторное произведение ортов i K и k K |
||||||||||||||||||||||||||||||||||||||
осей |
x K |
|
и |
|
z K . |
Аналогично можно построить вспомогательную систему координат x |
y |
2 |
z |
2 |
, у которой |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||
z2 z1 |
|
и y2 |
|
y1 , а ось x2 достраивается ортогонально координатной плоскости |
y2 z2 . |
|
|
|
|
|
||||||||||||||||||||||||||||||
При построении системы координат x K y K z K следует обратить внимание на направление оси y K : устанавливая порядок сомножителей в векторном произведении исходных направляющих векторов надо


|
|
|
|
4.1. Образование замкнутого цикла последовательных преобразований координат |
|
|
|
|
197 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
i K |
i |
д |
cos x K , X |
д |
j |
д |
cos x K , Y |
|
k |
д |
cos x K , Z |
д |
; |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(4.8) |
|
|
|||||||||||
|
|
|
|
k K |
|
|
|
|
cos z K , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K , Y |
|
|
|
|
|
|
cos z K , Z |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
i |
д |
|
X |
д |
j |
д |
cos z |
|
k |
д |
д |
. |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
С учетом |
(8) |
и того, что |
|
|
x K |
x |
|
|
и |
|
y K |
y |
, находим |
|
орт |
|
|
j K |
|
оси |
|
y K |
|
системы координат |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
x K y K z K : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
j K i K k K |
|
|
|
|
|
|
i д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
jд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
д |
|
, Z |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
cos (x K , X |
|
) |
|
|
cos (x K , Y ) |
|
|
|
cos (x K |
|
) |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos (z |
K |
|
|
|
|
|
|
д |
) |
|
|
cos (z |
K |
|
д |
|
|
|
|
|
cos (z |
K |
|
|
|
д |
) |
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, X |
д |
|
|
|
|
, Y ) |
|
|
|
|
|
|
|
, Z |
д |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
i |
|
cos (x K ,Y ) |
cos (x K , Z |
д |
) |
|
j |
|
cos (x K , X |
д |
|
) |
|
cos (x K , Z |
д |
) |
|
k |
|
cos (x K , X |
д |
) |
cos (x K ,Y ) |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
д |
cos (z K , Z |
) |
|
|
cos (z K , X |
|
) |
|
cos (z K , Z |
) |
|
|
cos (z K , X |
) |
д |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
д |
cos (z K ,Y ) |
д |
|
|
|
|
д |
д |
|
|
д |
|
|
|
|
|
д |
д |
cos (z K ,Y ) |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|||||
|
|
|
cos (x K |
, Y ) cos (z K , Z |
д |
) cos (V) cos ( y K , Y ) i |
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
cos (x K , X |
д |
|
) cos (z K , |
Z |
д |
) cos (x K , Z |
д |
) cos (z K , X |
д |
) |
|
j |
д |
|
|
|
|
|
|
(4.9) |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
cos (x K |
, X |
д |
) cos (z K , |
Y ) cos (x K , Y ) cos (z K , X |
д |
) k |
д |
. |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
В выражение (9) нормирующий множитель |
|
|
|
|
|
y не вводился, т.к. в данном случае |
|
|
y 1 . Это следствие |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
того, что орт j K определен через через нормированные векторы – через орты i K |
|
и k K , а не через другие |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ненормированные векторы. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y K |
|
|
|
|
|
|
||||||||||
|
|
Полученный результат (9) позволяет определить косинусы углов, которые ось |
|
|
составляет с осями |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
системы координат x K y K z K : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
cos y |
K , X |
д |
|
cos x K , Y |
|
cos z K , Z |
д |
cos x K , Z |
д |
cos z K , Y |
|
; |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|||||||
|
|
cos y K , Y |
|
|
cos x K , X |
д |
cos z K , Z |
д |
cos x K , |
|
Z |
д |
cos z K , X |
д |
; |
|
(4.10) |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
cos y K , Z |
д |
cos x K , X |
д |
|
cos x K , Y |
cos x K , |
|
Y |
|
cos z K , X |
д |
. |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
Поскольку |
косинусы |
|
углов |
|
между осями |
|
|
исходной |
X |
|
Y Z |
д |
|
и |
|
|
локальной |
|
|
x K y K z K системами |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rs K д обратного |
|
|
||||||||
координат определены (см. формулы (5), (7) и (10)), операторы Rs д K прямого и |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
результирующих преобразований координат записываются так: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
cos (x K , |
X |
д |
) |
|
|
cos (x K , Y ) |
|
cos (x K , Z |
д |
) |
|
|
|
o |
(K) |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
K , Z |
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
cos ( y K , |
Xд ) |
|
|
cos ( y K , Yд) |
|
cos ( y |
д) |
|
|
|
oY(K) |
|
|
|
|
|
(4.11) |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Rs д K |
cos (z |
K |
|
X |
|
) |
|
|
cos (z |
K |
|
|
cos (z |
K |
|
|
|
) |
|
|
|
o |
(K) ; |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
, |
д |
|
|
|
|
, Y ) |
|
|
|
|
|
|
, Z |
д |
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||


4.1. Образование замкнутого цикла последовательных преобразований координат |
199 |
Если один из промежуточных операторов, образующих результирующий оператор преобразования координат, описывает либо смещение вдоль единственной оси системы координат, либо поворот вокруг единственной оси системы координат, он вырождается в оператор перемещения или в оператор поворота системы координат и поэтому обозначается соответствующим образом (см. табл. 3.1):
Rs Kи K Rt , zд Rt , zи
и
Rs K Kи Rt , zд Rt , zи .
Для аналитического описания геометрии касания поверхности детали и исходной инструментальной поверхности полученные результаты дают возможность, во-первых, записать уравнения поверхностей Д и
И в одной общей системе координат x K y K z K и, во-вторых, при необходимости вести рассмотрение
процесса формообразования поверхности детали в любой промежуточной системе координат, переход к любой из которых возможен по цепи последовательных преобразований координат как в прямом, так и в обратном направлении.
Следует отметить, что несмотря на то, что построенные локальные системы координат |
x K y K z K и |
||
x K y K z |
K ортогональны, |
это не изменяет характера параметризации самой поверхности |
Д И : если в |
и и |
и |
XдYдZд поверхность Д И параметризована не ортогонально, это не значит, |
|
исходной системе координат |
|||
что та же поверхность Д И в новой ортогональной системе координат x1 y1z1 будет параметризована
ортогонально. Поэтому выполнять дополнительную проверку на ортогональность параметризации поверхности Д И (т.е. выполнение условия Fд и 0 ) не требуется. Эта проверка связана с видом
параметризации поверхности Д И , но не с видом системы координат, в которой эта поверхность описана. Оценку целесообразности изменения исходной параметризации поверхности Д на ортогональную
следует производить на ранних этапах решения задачи синтеза наивыгоднейшего формообразования поверхности детали. Однако это не всегда удобно, т.к. характер параметризации поверхности Д детали
бывает связан с формой и параметрами контура, ограничивающего обрабатываемый участок поверхности Д ,
с формой, параметрами и количеством “островков” на ней и пр. Поэтому изменять исходную параметризацию поверхности Д не всегда целесообразно1.
При образовании замкнутых циклов последовательных преобразований координат используются не только ортогональные декартовы системы координат, но и косоугольные системы координат, а также криволинейные координаты: цилиндрические, сферические и др.
1На любой |
поверхности |
Д И можно так ввести |
координаты, |
чтобы |
выполнялись |
условия |
E |
д и |
U |
|
, V |
1 , |
|
|
|
|
|
|
|
|
|
|
д и |
д и |
|
||
Fд и Uд и , Vд и |
0 . При этом |
функция Gд и Uд и , Vд и |
может быть |
любой |
положительной |
– такая |
система |
называется |
|||||
полугеодезической. Другой удобный вид координат – изотермические или конформные координаты. В этой системе |
Fд и Uд и , Vд и |
0 , |
|||||||||||
Eд и Uд и , Vд и |
Gд и Uд и , Vд и . Эти координаты характерны тем, что лежащие в некоторой области V прообразы “маленьких |
||||||||||||
фигур” на поверхности Д И почти подобны им, а углы между кривыми сохраняются. Находят применение чебышевские координаты: в
них Eд и U д и , Vд и Gд и Uд и , Vд и |
1 . Здесь длины координатных линий не изменяются, а |
Fд и Uд и , Vд и |
равняется косинусу |
|
угла между координатными линиями: |
Fд и Uд и , Vд и |
cos д и . Эти координаты применяются, например, |
при решении задач, |
|
связанных с раскроем листового материала. |
|
|
|
|